Subsistema de host MX2008
Descripción del subsistema de host MX2008
El subsistema de host proporciona procesos de protocolo de enrutamiento, así como procesos de software que controlan la interfaz del enrutador, los componentes del chasis, la administración del sistema y el acceso de los usuarios al enrutador. Estos procesos de enrutamiento se ejecutan sobre un núcleo que interactúa con el motor de reenvío de paquetes. El subsistema de host MX2008 consta de dos placas de enrutamiento y control, o RCB. El RCB es una placa integrada y una sola FRU que proporciona funcionalidad de motor de enrutamiento y tarjeta de control. El motor de enrutamiento realiza todas las funciones de procesamiento de rutas, mientras que el CB realiza la funcionalidad del plano de control y administración del chasis. El RCB proporciona funciones de plano de control. Puede instalar uno o dos RCB en el enrutador. Cada RCB funciona como una unidad.
El RCB MX2008 es similar a los CB-RE nativos admitidos por los enrutadores MX2000, con la única diferencia de que el RCB MX2008 es menos de la mitad del tamaño del CB-RE MX2000.
Instale dos RCB para obtener protección redundante. Si instala solo un RCB, puede instalarlo en la ranura 0 o en la ranura 1.
Si uno de los RCB falla, no quite el RCB fallido hasta que tenga un panel de reemplazo o en blanco para instalar.
Ver también
Tarjeta de enrutamiento y control MX2008 (MX2008 RCB) Descripción
La tarjeta de enrutamiento y control MX2008 (MX2008 RCB) es una placa integrada y una sola FRU que proporciona funcionalidad de motor de enrutamiento y tarjeta de control.
El RCB REMX2008-X8-128G está equipado con un procesador de 8 núcleos a 2,3 GHz, 128 GB de memoria y dos SSD de 200 GB y también admite el arranque seguro para una mayor seguridad de arranque.
El REMX2008-X8-64G-LT RCB está equipado con un procesador de 8 núcleos a 2,3 GHz, 64 GB de memoria y dos SSD de 100 GB. El RCB solo está equipado con soporte de cifrado limitado.
RCB compatibles
Los siguientes son algunos atributos clave del RCB MX2008:
-
El RCB combinó la tarjeta de control y el motor de enrutamiento en una sola FRU.
-
El RCB es conectable en caliente.
-
El RCB tiene menos de la mitad del tamaño del MX2000 CB-RE nativo.
El enrutador MX2008 admite los siguientes RCB:
-
REMX2008-X8-64G
-
REMX2008-X8-64G-LT
-
REMX2008-X8-128G
Función RCB
El RCB ejecuta Junos OS. Los procesos de software que se ejecutan en el RCB mantienen las tablas de enrutamiento, administran los protocolos de enrutamiento utilizados en el enrutador, controlan las interfaces del enrutador, controlan algunos componentes del chasis y proporcionan la interfaz para la administración del sistema y el acceso de los usuarios al enrutador.
Ranuras RCB
El usuario puede instalar uno o dos RCB en el enrutador. Cada RCB es un motor de enrutamiento y una tarjeta de control combinados en una unidad. Un puerto USB en el RCB acepta un dispositivo de almacenamiento USB que le permite cargar Junos OS. Puede instalar los RCB en la parte frontal del chasis en ranuras verticales etiquetadas como 0 y 1. Si se instalan dos RCB, uno funciona como principal y el otro actúa como respaldo. Si se produce un error o se elimina el RCB principal y la copia de seguridad se configura correctamente, la copia de seguridad se convierte en la principal. Si no hay ningún RCB instalado en una ranura, instale un panel en blanco en la ranura.
Se debe instalar un mínimo de un RCB en la ranura 0 o en la ranura 1 en todo momento.
Si uno de los RCB falla, no quite el RCB fallido hasta que tenga un panel de reemplazo o en blanco para instalar.
Panel frontal RCB
La Tabla 1 describe la tarjeta de enrutamiento y control (RCB).
|
Figura 1: Vista
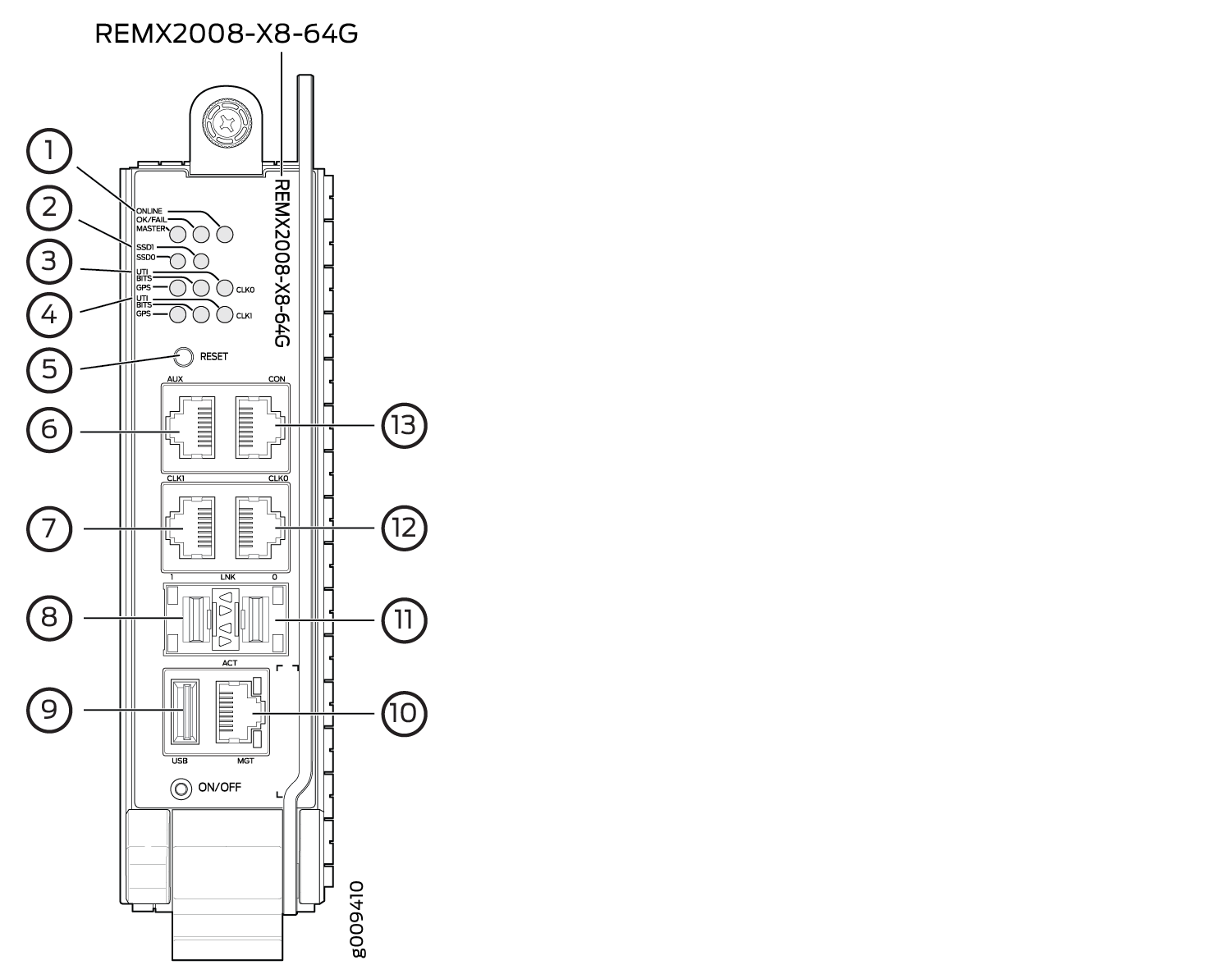 frontal del RCB frontal del RCB
|
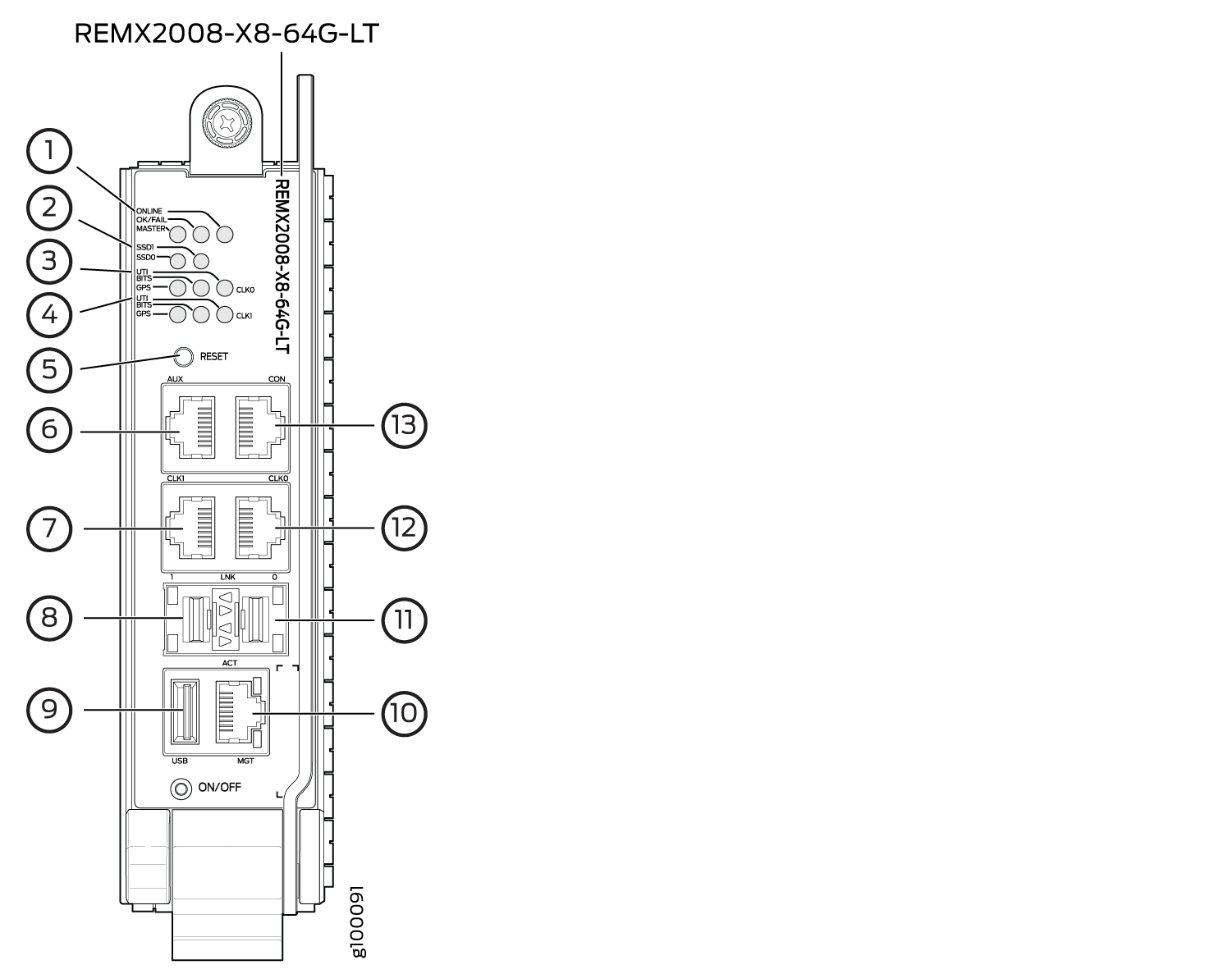
Figura 2: Vista frontal RCB (REMX2008–X8-64G-LT)
|
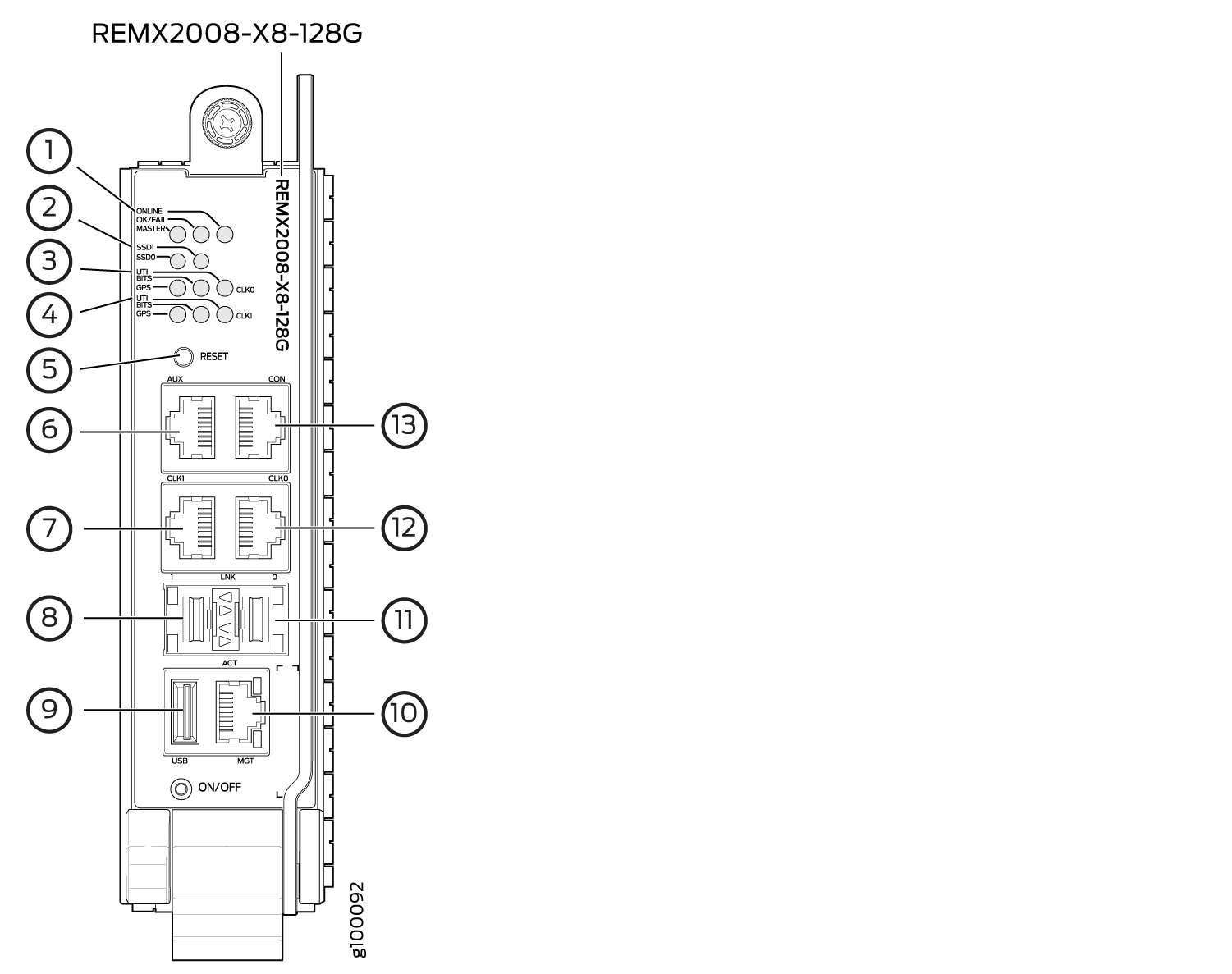
Figura 3: Vista frontal RCB (REMX20008–X8-128G)
|
| Función No. |
Etiqueta |
Descripción |
|---|---|---|
| 1 |
EN LÍNEA, MAESTRO y OK/FAIL |
Hay un LED bicolor para cada control RCB. El LED ONLINE indica que el RCB está realizando la transición en línea y funcionando correctamente. El LED MASTER indica que esta placa es un RCB primario y el LED OK/FAIL indica que el RCB ha fallado. |
| 2 |
SSD0 y SSD1 |
Los LED muestran el estado de las dos unidades de estado sólido (SSD) en el RCB. |
| 3 4 |
GPS, UT1 y BITS |
Estos puertos muestran el estado de la interfaz de temporización externa. Hay un LED bicolor para cada interfaz de reloj externo: GPS, UTI y BITS. |
| 5 |
RESTABLECIMIENTO |
Este botón sirve para reiniciar el RCB. |
| 6 |
AUX |
Este puerto se utiliza para conectar un ordenador portátil, módem u otra unidad auxiliar. |
| 7 12 |
CLK0 y CLK1 |
Conecta el RCB a dos interfaces de reloj externas para la función BITS y GPS a través de un cable serie con un conector RJ-45. |
| 8 11 |
LNK-0 y LNK-1 |
Dos puertos SFP+ conectan el RCB a través de una conexión Ethernet para admitir diagnósticos de hardware y pruebas de puertos JCS. El puerto admite dos conexiones de 1 Gbps o 10 Gbps. El LED de estos puertos está asociado a cada uno de los puertos SFP+ (XGE-0 y XGE-1) e indica la conexión en uso. |
| 9 |
USB |
Este puerto se utiliza para instalar una unidad flash USB que contenga Junos OS. |
| 10 |
MGT |
Este puerto es un canal de administración dedicado para el mantenimiento de dispositivos. También se utiliza para que los administradores del sistema supervisen y administren el enrutador MX2008 de forma remota. |
| 13 |
CONSOLA |
Este puerto se utiliza para configurar el enrutador MX2008. |
Puertos de interfaz RCB
Tres puertos, ubicados en el RCB, conectan el RCB a uno o más dispositivos externos en los que los administradores del sistema pueden emitir comandos de la CLI de Junos OS para administrar el enrutador. Además, cuatro puertos ubicados en el RCB incluyen, dos conectores de interfaz SFP+ de 10 Gigabit Ethernet que admiten diagnósticos de hardware (pruebas de puerto JCS) y dos interfaces de reloj externas para la función BITS y GPS.
Los puertos de interfaz RCB con las etiquetas indicadas funcionan de la siguiente manera:
-
AUX: conecta el RCB a un portátil, módem u otro dispositivo auxiliar a través de un cable serie con un conector RJ-45.
-
CONSOLA: conecta el RCB a una consola del sistema a través de un cable serie con un conector RJ-45.
-
MGT: conecta el RCB a través de una conexión Ethernet a una LAN de administración (o a cualquier otro dispositivo que se conecte a una conexión Ethernet) para una administración fuera de banda. El puerto utiliza un conector RJ-45 de detección automática para admitir conexiones de 10 Mbps, 100 Mbps o 1000 Mbps. Dos pequeños LED en la parte inferior del puerto indican la conexión en uso: el LED parpadea en amarillo o verde para una conexión de 10 Mbps, 100 Mbps o 1000 Mbps, y el LED se ilumina en verde cuando el tráfico pasa a través del puerto.
Los puertos de interfaz de la tarjeta de control funcionan de la siguiente manera:
-
USB: proporciona una interfaz de medios extraíbles a través de la cual puede instalar Junos OS manualmente. Junos OS es compatible con USB versión 1.0 y posteriores.
-
LNK-0 y LNK-1: dos puertos SFP+ conectan el RCB a través de Ethernet para admitir dos conexiones de 1 Gbps o 10 Gbps a cualquier caja de control externa. Dos pequeños LED en el lateral de cada puerto SFP+ indican la conexión en uso: el LED parpadea en amarillo cuando no hay un vínculo, parpadea en verde cuando hay actividad o se ilumina en verde para una conexión de 1 Gbps o 10 Gbps.
-
CLK-0 y CLK-1: conectan el RCB a un dispositivo reloj externo a través de un cable serie con un conector RJ-45.
Ver también
MX2008 RCB LEDs
La tarjeta de enrutamiento y control (RCB) es una placa integrada y una sola FRU que proporciona funcionalidad de motor de enrutamiento y tarjeta de control.
Cada parte del motor de enrutamiento en el RCB tiene tres LED que indican su estado. Los LED, etiquetados como ONLINE, MASTER, OK/FAIL, se encuentran directamente en la placa frontal del RCB. En la Tabla 2 se describen las funciones de la interfaz del motor de enrutamiento del RCB. Hay tres LED en la interfaz de la nave para cada motor de enrutamiento (RE0 y RE1). Estos LED están etiquetados como MASTER, ONLINE y OFFLINE.
El LED GPS se enciende cuando el RCB está conectado a una interfaz de temporización externa.
La tarjeta de control, parte del subsistema host, tiene un conjunto de LED bicolores que muestran su estado. Los LED, etiquetados como LINK, GPS y BITS, se encuentran directamente en la placa frontal del RCB. En la Tabla 2 se describen las funciones de la interfaz de la tarjeta de control del RCB. Hay dos LED en la interfaz de la nave para cada tarjeta de control: uno etiquetado CB-RE0 (extremo izquierdo) y otro etiquetado CB-RE1 (extremo derecho). Para obtener más información acerca de los LED RCB y del motor de enrutamiento en la interfaz de nave, consulte LED de componentes MX2008 en la interfaz de embarcación.
RCB
| Función No. |
Etiqueta |
Color |
Estado |
Descripción |
|---|---|---|---|---|
| 1 |
EN LÍNEA |
Verde |
Parpadeo lento |
RCB está iniciando BIOS. |
| Parpadeo rápido |
RCB está iniciando Linux. |
|||
| Encendido constante |
Tanto Junos OS como Linux se cargan correctamente en el RCB. |
|||
| – |
Apagado |
RCB está fuera de línea. |
||
| MAESTRO |
Azul |
Encendido constante |
RCB es el principal. |
|
| ACEPTAR/FALLAR |
Amarillo |
Encendido constante |
RCB ha fracasado. |
|
| Apagado |
RCB está funcionando normalmente. |
|||
| 2 |
SSD0 |
Verde |
Intermitente |
SSD0 está activo. |
| SSD1 |
Verde |
Intermitente |
SSD1 está activo. |
|
| 3 |
UT1 |
Verde |
Encendido constante |
La interfaz de temporización universal (UTI) está activa. |
| Rojo |
Encendido constante |
Error en la interfaz de sincronización de UTI. |
||
| – |
Apagado |
La interfaz de sincronización de UTI está desconectada. |
||
| BITS |
Verde |
Encendido constante |
La interfaz de sincronización externa de suministro de temporización integrada en el edificio (BITS) está activa. |
|
| Rojo |
Encendido constante |
Error en la interfaz de sincronización externa de BITS. |
||
| – |
Apagado |
La interfaz de temporización externa de BITS está desconectada. |
||
| GPS |
Verde |
Encendido constante |
La interfaz de temporización externa del sistema de posicionamiento global (GPS) está activa. |
|
| Rojo |
Encendido constante |
La interfaz de sincronización externa GPS ha fallado. |
||
| – |
Apagado |
La interfaz de sincronización externa GPS está desconectada. |
Ver también
Especificaciones del motor de enrutamiento
En la Tabla 3 se enumeran las especificaciones actuales de los motores de enrutamiento compatibles con los enrutadores serie M, MX y T. En la tabla 4 se enumeran las especificaciones de hardware de los motores de enrutamiento compatibles con VMHost. La Tabla 5 enumera las especificaciones para los motores de enrutamiento al final de su vida útil.
Para obtener una lista de los motores de enrutamiento compatibles con los enrutadores serie M, MX, T y PTX, consulte Motores de enrutamiento compatibles por enrutador.
Motor de enrutamiento |
Procesador |
Memoria |
Conexión a PFE |
Disco |
Medio |
Primer soporte de Junos OS |
Tarjeta de control del interruptor |
|---|---|---|---|---|---|---|---|
RE-400-768 |
Celeron de 400 MHz |
768 MB |
Ethernet rápida |
Disco duro de 40 GB |
Tarjeta CompactFlash de 1 GB |
9.0 |
– |
| RE-A-1000-2048 |
Pentium de 1,0 GHz |
2048 MB |
Gigabit Ethernet |
Disco duro de 40 GB |
Tarjeta CompactFlash de 1 GB |
8.1 |
– |
RE-A-2000-4096 |
Pentium de 2,0 GHz |
4096 MB |
Gigabit Ethernet |
Disco duro de 40 GB |
Tarjeta CompactFlash de 1 GB |
8.1 |
– |
RE-S-1300-2048 |
Pentium de 1,3 GHz |
2048 MB |
Gigabit Ethernet |
Disco duro de 40 GB |
Tarjeta CompactFlash de 1 GB |
8.2 |
SCB, SCBE |
RE-S-2000-4096 |
Pentium de 2,0 GHz |
4096 MB |
Gigabit Ethernet |
Disco duro de 40 GB |
Tarjeta CompactFlash de 1 GB |
8.2 |
SCB, SCBE |
RE-C1800 |
1,8 GHz |
8 GB |
Gigabit Ethernet |
SSD |
Tarjeta CompactFlash de 4 GB |
Enrutador T1600 en una matriz de enrutamiento: 9.6R2 Enrutador T640 o T1600 independiente:11.2 |
CB-T para un enrutador independiente. CB-LCC para un enrutador en una matriz de enrutamiento. |
1,8 Ghz |
16 GB |
Gigabit Ethernet |
SSD |
Tarjeta CompactFlash de 4 GB |
Junos OS de 32 bits en un enrutador T1600 independiente: 11.4R2 Junos OS de 32 bits en un enrutador T1600 en una matriz de enrutamiento: 11.4R2 Junos OS de 64 bits en un enrutador T1600 independiente: 11.4R2 Junos OS de 64 bits en un enrutador T1600 en una matriz de enrutamiento: 11.4R2 |
CB-T para un enrutador independiente. CB-LCC para un enrutador en una matriz de enrutamiento. |
|
RE-C2600 |
2,6 GHz |
16 GB |
Gigabit Ethernet |
SSD |
Tarjeta CompactFlash de 4 GB |
Enrutador TX Matrix Plus: 9.6R2 |
– |
RE-A-1800x2 |
1800 MHz |
8 GB o 16 GB |
Gigabit Ethernet |
SSD de 32 GB |
Tarjeta CompactFlash de 4 GB |
10.4 |
– |
RE-S-1800x2 |
1800 MHz |
8 GB o 16 GB |
Gigabit Ethernet |
SSD de 32 GB |
Tarjeta CompactFlash de 4 GB |
10.4 |
SCB, SCBE, SCBE2, SCBE3 |
RE-S-1800x4 |
1800 MHz |
8 GB o 16 GB |
Gigabit Ethernet |
SSD de 32 GB |
Tarjeta CompactFlash de 4 GB |
10.4 |
SCB, SCBE, SCBE2, SCBE3 |
RE-S-MX104 |
1,8 GHz |
4 GB |
Gigabit Ethernet |
– |
Flash NAND de 8 GB |
13.2 |
– |
RE-B-1800x1-4G |
1,73 GHz |
4 GB |
Gigabit Ethernet |
SSD de 64 GB |
Tarjeta CompactFlash de 4 GB |
12.1R2, 11.4R4 y 12.2R1 |
– |
RE-MX2000-1800x4 |
1,8 GHz |
16 GB |
Gigabit Ethernet |
SSD de 32 GB |
Tarjeta CompactFlash interna fija de 4 GB |
12,3 R2 |
SFB |
RE-S-1800X4-32G-S |
1,8 Ghz |
32 GB |
Gigabit Ethernet |
SSD de 32 GB |
Tarjeta CompactFlash interna fija de 4 GB |
|
SCB, SCBE, SCBE2, SCBE3 |
REMX2K-1800-32G-S |
1,8 Ghz |
32 GB |
Gigabit Ethernet |
SSD de 32 GB |
Tarjeta CompactFlash interna fija de 4 GB |
|
– |
RE-S-X6-64G, RE-S-X6-64G-LT |
2 Ghz |
64 GB |
Gigabit Ethernet |
Dos SSD de 50 GB |
- |
|
SCBE2, SCBE3 |
REMX2K-X8-64G |
2 Ghz |
64 GB |
Gigabit Ethernet |
Dos SSD de 100 GB |
- |
15.1F5-S1, 16.1R2 y 16.2R1 |
– |
REMX2K-X8-64G-LT |
2 Ghz |
64 GB |
Gigabit Ethernet |
Dos SSD de 100 GB |
- |
17.2R1 |
– |
REMX2008-X8-64G |
2,3 Ghz |
64 GB |
Gigabit Ethernet |
Dos SSD de 50 GB |
– |
15.1F7 |
– |
RE-S-1600x8 |
1,6 Ghz |
64 GB |
Gigabit Ethernet |
Dos SSD de 50 GB |
– |
17.3R1 |
– |
REMX2008-X8-64G-LT |
2.1 Ghz |
64 GB |
Gigabit Ethernet |
Dos SSD de 100 GB |
- |
17.2R1 |
- |
REMX2008-X8-128G |
2,3 Ghz |
128 GB |
Gigabit Ethernet |
Dos SSD de 200 GB |
- |
18.2R1 |
- |
RE-S-X6-128G |
2,0 Ghz |
128 GB |
Gigabit Ethernet |
Dos SSD de 200 GB |
- |
18.1R1 (SCBE2) 18.4R1 (SCBE3) |
SCBE2, SCBE3 |
| RE-S-X6-128G-K |
2,0 Ghz |
128 GB |
Gigabit Ethernet |
Dos SSD de 200 GB |
- |
22,2R1S2 |
SCBE2, SCBE3 |
REMX2K-X8-128G |
REMX2K-X8-128G | 128 GB |
Gigabit Ethernet |
Dos SSD de 200 GB |
- |
18.1R1 |
- |
JNP10003-RE1 |
1,6 GHz |
64 GB |
Gigabit Ethernet |
Dos SSD de 100 GB |
- |
17.3R1 |
- |
JNP10003-RE1-LT |
1,6 GHz |
64 GB |
Gigabit Ethernet |
Dos SSD de 100 GB |
- |
18.1R1 |
- |
JNP10K-RE0 |
2,5 GhZ |
32 GB |
Gigabit Ethernet |
Dos SSD de 50 GB |
- |
17.2R1 |
- |
JNP10K-RE1 |
2,3 GhZ |
64 GB |
Gigabit Ethernet |
Dos SSD de 200 GB |
- |
18.2R1 |
- |
JNP10K-RE1-LT |
2,3 GhZ |
64 GB |
Gigabit Ethernet |
Dos SSD de 200 GB |
- |
18.3R1 |
- |
JNP10K-RE1-128 |
2,3 GhZ |
128 GB |
Gigabit Ethernet |
Dos SSD de 200 GB |
- |
18.3R1 |
- |
Utilice cables blindados CAT5e, CAT6 o CAT7 para conectar los puertos AUX, CONSOLE y MGMT en los motores de enrutamiento RE-S-X6-64G, REMX2K-X8-64G y REMX2008-X8-64G.
En la tabla 4 se enumeran las especificaciones de hardware de los motores de enrutamiento compatibles con VMHost.
Número de modelo |
Compatible con el dispositivo |
Características técnicas |
|---|---|---|
| RE-S-X6-64G |
MX240, MX480 y MX960 |
|
| RE-S-X6-128G |
MX240, MX480 y MX960 |
|
| REMX2K-X8-64G |
MX2020 y MX2010 |
|
| RE-PTX-X8-64G |
PTX5000 |
|
| RCB-PTX-X6-32G |
PTX3000 |
RCB combina la funcionalidad de un motor de enrutamiento, una tarjeta de control y un generador de reloj centralizado (CCG) |
| RE-S-1600x8 |
MX10003 |
|
| RE-S-1600x8 |
MX204 |
|
| JNP304-RE-S |
MX304 |
|
| RE-QFX10002-60C |
QFX10002-60C |
|
| RE-PTX10002-60C |
PTX10002-60C |
|
| RE-ACX-5448 |
ACX5448 |
|
| RE-X10 |
MX10008 |
|
Motor de enrutamiento |
Procesador |
Memoria |
Conexión a PFE |
Disco |
Medio |
Primer soporte de Junos OS |
Detalles de EOL |
|---|---|---|---|---|---|---|---|
RE-333-256 |
Pentium II de 333 MHz |
256 MB |
Ethernet rápida |
Disco duro de 6,4 GB |
Tarjeta CompactFlash de 80 MB |
3.4 |
|
RE-333-768 |
Pentium II de 333 MHz |
768 MB |
Ethernet rápida |
Disco duro de 6,4 GB |
Tarjeta CompactFlash de 80 MB |
3.4 |
|
RE-600-512 |
Pentium III de 600 MHz |
512 MB |
Ethernet rápida |
Disco duro de 30 GB |
Tarjeta CompactFlash de 256 MB |
5.4 |
|
RE-600-2048 |
Pentium III de 600 MHz |
2048 MB |
Ethernet rápida |
Disco duro de 40 GB |
Tarjeta CompactFlash de 1 GB |
5.3 |
|
RE-850-1536 |
Pentium III de 850 MHz |
1536 MB |
Ethernet rápida |
Disco duro de 40 GB |
Tarjeta CompactFlash de 1 GB |
7.2 |
|
RE-M40 |
Pentium de 200 MHz |
256 MB |
Ethernet rápida |
Disco duro de 6,4 GB |
Tarjeta CompactFlash de 80 MB |
3.2 |
|
RE-M40-333-768 |
Pentium II de 333 MHz |
768 MB |
Ethernet rápida |
Disco duro de 10 GB |
Tarjeta CompactFlash de 80 MB |
4.2 |
|
RE-M40-600-2048 |
Pentium III de 600 MHz |
2048 MB |
Ethernet rápida |
Disco duro de 30 GB |
Tarjeta CompactFlash de 128 MB |
5.4 |
|
RE-1600-2048 |
Pentium M de 1,6 GHz |
2048 MB |
Gigabit Ethernet |
Disco duro de 40 GB |
Tarjeta CompactFlash de 1 GB |
6.2 |
La memoria de la tabla 3 indica la cantidad de memoria total. Para determinar la cantidad de memoria disponible, ejecute el comando de la show chassis routing-engine CLI.
En los enrutadores que aceptan dos motores de enrutamiento, no puede mezclar tipos de motor de enrutamiento, excepto por un breve período (un minuto más o menos) durante una actualización o degradación a dos motores de enrutamiento del mismo tipo.
Ver también
Motores de enrutamiento admitidos por enrutador
En las tablas siguientes se enumeran los motores de enrutamiento compatibles con cada enrutador, la primera versión compatible con el motor de enrutamiento en el enrutador especificado, la interfaz Ethernet de administración y las interfaces Ethernet internas para cada motor de enrutamiento.
- Motores de enrutamiento M7i
- Motores de enrutamiento M10i
- Motores de enrutamiento M40e
- Motores de enrutamiento M120
- Motores de enrutamiento M320
- Motor de enrutamiento MX5, MX10, MX40 y MX80
- Motores de enrutamiento MX104
- Motor de enrutamiento MX204
- Motor de enrutamiento MX304
- Motores de enrutamiento MX240
- Motores de enrutamiento MX480
- Motores de enrutamiento MX960
- Motores de enrutamiento MX2008
- Motores de enrutamiento MX2010
- Motores de enrutamiento compatibles con MX2020
- Motores de enrutamiento MX10003
- Motores de enrutamiento MX10008
- Motores de enrutamiento PTX1000
- Motores de enrutamiento PTX3000
- Motores de enrutamiento PTX5000
- Motores de enrutamiento PTX10008 y PTX10016
- Motor de enrutamiento PTX10001
- Motor de enrutamiento PTX10002-60
- Motores de enrutamiento T320
- Motores de enrutamiento T640
- Motores de enrutamiento T1600
- Motores de enrutamiento T4000
- Motores de enrutamiento de matriz TX
- Motores de enrutamiento de TX Matrix Plus
- Motores de enrutamiento TX Matrix Plus (con SIB 3D)
Motores de enrutamiento M7i
En la Tabla 6 se enumeran los motores de enrutamiento compatibles con el enrutador M7i. El enrutador M7i solo es compatible con Junos OS de 32 bits.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| RE-400-768 (detalles EOL: TSB16445) |
|
9.0 |
fxp0 |
FXP1 |
| RE-850-1536 (detalles EOL: TSB15553) |
|
7.2 |
fxp0 |
FXP1 |
| RE-B-1800X1-4G |
|
11.4R4 12.1R2 |
fxp0 |
em0 |
Motores de enrutamiento M10i
En la Tabla 7 se enumeran los motores de enrutamiento compatibles con el enrutador M10i. El enrutador M10i solo es compatible con Junos OS de 32 bits.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| RE-400-768 (detalles EOL: TSB16445) |
|
9.0 |
fxp0 |
FXP1 FXP2 |
| RE-850-1536 (detalles EOL: TSB15553) |
|
7.2 |
fxp0 |
FXP1 FXP2 |
| RE-B-1800X1-4G |
|
11.4R4 12.1R2 |
fxp0 |
em0 |
Motores de enrutamiento M40e
En la Tabla 8 se enumeran los motores de enrutamiento compatibles con el enrutador M40e.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| RE-600-2048 (detalles EOL: TSB14373) |
|
5.3 |
fxp0 |
FXP1 FXP2 |
| RE-A-1000-2048 |
|
8.1 |
fxp0 |
FXP1 FXP2 |
Motores de enrutamiento M120
En la Tabla 9 se enumeran los motores de enrutamiento compatibles con el enrutador M120.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| RE-A-1000-2048 |
|
8,0 R2 |
– |
fxp0 |
FXP1 FXP2 |
| RE-A-2000-4096 |
|
8,0 R2 |
– |
fxp0 |
em0 BCM0 |
| RE-A-1800X2-8G |
|
|
10.4 |
fxp0 |
FXP1 FXP2 |
| RE-A-1800X2-16G |
|
|
10.4 |
fxp0 |
FXP1 FXP2 |
| RE-A-1800X4-16G |
|
|
10.4 |
fxp0 |
em0 EM1 |
Motores de enrutamiento M320
En la tabla 10 se enumeran los motores de enrutamiento compatibles con el enrutador M320.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| RE-1600-2048 (detalles EOL: TSB14374) |
|
6.2 |
– |
fxp0 |
FXP1 FXP2 |
| RE-A-2000-4096 |
|
8.1 |
– |
fxp0 |
em0 BCM0 |
| RE-A-1800X2-8G |
|
|
10.4 |
fxp0 |
em0 BCM0 |
| RE-A-1800X2-16G |
|
|
10.4 |
fxp0 |
em0 BCM0 |
| RE-A-1800X4-8G |
|
|
10.4 |
fxp0 |
em0 EM1 |
Motor de enrutamiento MX5, MX10, MX40 y MX80
En la Tabla 11 se enumeran los motores de enrutamiento compatibles con los enrutadores MX5, MX10, MX40 y MX80.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| Motor de enrutamiento integrado |
|
12.3 |
- |
fxp0 |
em0 EM1
Nota:
em1 se utiliza para comunicarse con el MS-MIC cuando se inserta. |
Motores de enrutamiento MX104
La Tabla 12 enumera los motores de enrutamiento compatibles con los enrutadores MX104.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| RE-S-MX104 |
|
13.2 |
– |
fxp0 |
em0 EM1 |
Motor de enrutamiento MX204
La Tabla 13 enumera los motores de enrutamiento compatibles con el enrutador MX204.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| Motor de enrutamiento integrado |
|
- |
17.4 |
fxp0 |
em2 EM3 EM4 |
Motor de enrutamiento MX304
La Tabla 14 enumera los motores de enrutamiento compatibles con el enrutador MX304.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| JNP304-RE-S |
|
- |
22.2R |
fxp0 |
fxp0 |
Motores de enrutamiento MX240
En la Tabla 15 se enumeran los motores de enrutamiento compatibles con los enrutadores MX240.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| RE-S-1300-2048 (detalles EOL: TSB16556 |
|
9.0 |
– |
fxp0 |
FXP1 FXP2 |
| RE-S-2000-4096 (detalles EOL: TSB16735 |
|
9.0 |
– |
fxp0 |
FXP1 FXP2 |
| RE-S-1800X2-8G (detalles EOL: TSB16556 |
|
|
10.4 |
fxp0 |
em0 EM1 |
| RE-S-1800x2-16G (detalles EOL: TSB16556 |
|
|
10.4 |
fxp0 |
em0 EM1 |
| RE-S-1800X4-8G |
|
|
10.4 |
fxp0 |
em0 EM1 |
| RE-S-1800X4-16G |
|
|
10.4 |
fxp0 |
em0 EM1 |
| RE-S-1800X4-32G-S |
|
|
|
fxp0 |
em0, EM1 |
| RE-S-X6-64G |
|
– |
15.1F4 16.1R1 |
fxp0 |
IXLv0, IGB0 |
| RE-S-X6-64G-LT |
|
– |
17.2R1 |
fxp0 |
IXLv0, IGB0 em0 |
| RE-S-X6-128G |
|
– |
18.1R1 |
fxp0 |
IXLv0, IGB0 em0 |
| RE-S-X6-128G-K | RE-S-X6-128G-K | - | 22,2R1S2 | fxp0 | IXLv0, IGB0, EM0 |
| RE-S-X6-128G-LT | RE-S-X6-128G-LT | - | 24.2R1 | fxp0 | IXLv0, IGB0, EM0 |
Motores de enrutamiento MX480
La Tabla 16 enumera los motores de enrutamiento compatibles con los enrutadores MX480.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| RE-S-1300-2048 (detalles EOL: TSB16556 |
|
8.4 |
– |
fxp0 |
FXP1 FXP2 |
| RE-S-2000-4096 (detalles EOL: TSB16735 |
|
8.4 |
– |
fxp0 |
FXP1 FXP2 |
| RE-S-1800X2-8G (detalles EOL: TSB16556 |
|
|
10.4 |
fxp0 |
em0 EM1 |
| RE-S-1800X2-16G (detalles del EOL: TSB16556 |
|
|
10.4 |
fxp0 |
em0 EM1 |
| RE-S-1800X4-8G |
|
|
10.4 |
fxp0 |
em0 EM1 |
| RE-S-1800X4-16G |
|
|
10.4 |
fxp0 |
em0 EM1 |
| RE-S-1800X4-32G-S |
|
|
|
fxp0 |
em0 EM1 |
| RE-S-X6-64G |
|
– |
15.1F4 16.1R1 |
fxp0 |
IXLv0, IGB0 |
| RE-S-X6-64G-LT |
|
– |
17.2R1 |
fxp0 |
IXLv0, IGB0 em0 |
| RE-S-X6-128G |
|
– |
18.1R1 |
fxp0 |
IXLv0, IGB0 em0 |
| RE-S-X6-128G-K | RE-S-X6-128G-K | - | 22,2R1S2 | fxp0 | IXLv0, IGB0, EM0 |
| RE-S-X6-128G-LT | RE-S-X6-128G-LT | - | 24.2R1 | fxp0 | IXLv0, IGB0, EM0 |
Motores de enrutamiento MX960
La Tabla 17 enumera los motores de enrutamiento compatibles con los enrutadores MX960.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| RE-S-1300-2048 (detalles EOL: TSB16556 |
|
8.2 |
– |
fxp0 |
FXP1 FXP2 |
| RE-S-2000-4096 (detalles EOL: TSB16735 |
|
8.2 |
– |
fxp0 |
FXP1 FXP2 |
| RE-S-1800X2-8G (detalles EOL: TSB16556 |
|
|
10.4 |
fxp0 |
em0 EM1 |
| RE-S-1800X2-16G (detalles del EOL: TSB16556 |
|
|
10.4 |
fxp0 |
em0 EM1 |
| RE-S-1800X4-8G |
|
|
10.4 |
fxp0 |
em0 EM1 |
| RE-S-1800X4-16G |
|
|
10.4 |
fxp0 |
em0 EM1 |
| RE-S-1800X4-32G-S |
|
|
|
fxp0 |
em0 EM1 |
| RE-S-X6-64G |
|
– |
15.1F4 16.1R1 |
fxp0 |
IXLv0, IGB0 |
| RE-S-X6-64G (para MX960-VC) |
|
– |
17.2R1 |
fxp0 |
IXLv0, IGB0 |
| RE-S-X6-64G-LT |
|
– |
17.2R1 |
fxp0 |
IXLv0, IGB0 em0 |
| RE-S-X6-128G |
|
– |
18.1R1 |
fxp0 |
IXLv0, IGB0 em0 |
| RE-S-X6-128G-K | RE-S-X6-128G-K | - | 22,2R1S2 | fxp0 | IXLv0, IGB0, EM0 |
| RE-S-X6-128G-LT | RE-S-X6-128G-LT | - | 24.2R1 | fxp0 | IXLv0, IGB0, EM0 |
Motores de enrutamiento MX2008
En la tabla 18 se enumeran los motores de enrutamiento compatibles con los enrutadores MX2008.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| REMX2008-X8-64G |
|
15.1F7 |
fxp0 |
ixlv0 IXLv1 |
| REMX2008-X8-64G-LT |
|
17.2R1 |
fxp0 |
ixlv0 IXLv1 |
| REMX2008-X8-128G |
RE-MX2008-X8-128G |
18.2R1 |
fxp0 |
ixlv0 IXLv1 |
Motores de enrutamiento MX2010
En la tabla 19 se enumeran los motores de enrutamiento compatibles con los enrutadores MX2010.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| RE-MX2000-1800X4 |
|
12,3 R2 |
fxp0 |
em0 EM1 |
| REMX2K-1800-32G-S |
|
|
fxp0 |
em0 EM1 |
| REMX2K-X8-64G |
|
|
fxp0 |
ixlv0 IXLv1 em0 |
| REMX2K-X8-64G-LT |
|
17.2R1 |
fxp0 |
ixlv0 IXLv1 em0 |
| REMX2K-X8-128G |
|
18.1R1 |
fxp0 |
ixlv0 IXLv1 |
Motores de enrutamiento compatibles con MX2020
En la Tabla 20 se enumeran los motores de enrutamiento compatibles con los enrutadores MX2020.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| RE-MX2000-1800X4 |
|
12,3 R2 |
fxp0 |
em0 EM1 |
| REMX2K-1800-32G-S |
|
|
fxp0 |
em0 EM1 |
| REMX2K-X8-64G |
|
|
fxp0 |
ixlv0 IXLv1 em0 |
| REMX2K-X8-64G-LT |
|
17.2R1 |
fxp0 |
ixlv0 IXLv1 em0 |
| REMX2K-X8-128G |
|
18.1R1 |
fxp0 |
ixlv0 IXLv1 em0 |
Motores de enrutamiento MX10003
En la Tabla 21 se enumeran los motores de enrutamiento compatibles con MX10003 enrutadores.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| JNP10003-RE1 |
|
17.3R1 |
fxp0 |
EM3 EM4 |
| JNP10003-RE1-LT |
|
18.1R1 |
fxp0 |
EM3 EM4 |
Motores de enrutamiento MX10008
En la Tabla 22 se enumeran los motores de enrutamiento admitidos en el enrutador MX10008.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| JNP10K-RE1 |
|
18.2R1 |
em0 |
BME0 BME1 |
Motores de enrutamiento PTX1000
En la tabla 23 se enumera el motor de enrutamiento admitido en el PTX1000.
El PTX1000 solo es compatible con Junos OS de 64 bits.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| Motor de enrutamiento integrado |
|
|
em0 em2 |
BME0 EM1 |
Motores de enrutamiento PTX3000
En la Tabla 24 se enumeran los motores de enrutamiento admitidos en el PTX3000.
El PTX3000 solo es compatible con Junos OS de 64 bits.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| RE-DUO-C2600-16G |
|
13,2 R2 |
em0 |
ixgbe0 ixgbe1 |
| RCB-PTX-X6-32G |
|
16.1R4 17.1R1 Este motor de enrutamiento no es compatible con Junos OS versión 16.2. |
em0 |
ixlv0 IXLv1 |
Motores de enrutamiento PTX5000
En la Tabla 25 se enumeran los motores de enrutamiento admitidos en el PTX5000.
-
PTX5000 solo es compatible con Junos OS de 64 bits.
-
El enrutador PTX5000 admite dos planos medios. El plano medio identificado como
Midplane-8Sen la salida de la CLI es compatible con las versiones 12.1X48, 12.3 y 13.2 de Junos OS. El plano medio mejorado, identificado como compatible desdeMidplane-8SePla versión 14.1 de Junos OS en adelante.El motor de enrutamiento RE-DUO-2600 con Junos OS 13.2 o anterior no es compatible con el plano medio PTX5000BASE2.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| RE-DUO-C2600-16G |
|
12,1X48 12.3 13.2
Nota:
El PTX5000 no es compatible con Junos OS versiones 12.1, 12.2 o 13.1. |
em0 |
ixgbe0 ixgbe1 |
| RE-PTX-X8-64G |
|
15.1F4 16.1R1 |
em0 |
ixlv0 IXLv1 EM1 |
| RE-PTX-X8-128G |
|
18.1R1 |
em0 |
ixlv0 IXLv1 EM1 |
Motores de enrutamiento PTX10008 y PTX10016
En la Tabla 26 se enumeran los motores de enrutamiento admitidos en los enrutadores PTX10008 y PTX10016.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| JNP10K-RE0 |
|
17.2R1 |
em0, em1 |
BME0 BME1 |
| JNP10K-RE1 (en PTX10008) |
|
18.2R1 |
em0 EM1 |
BME0 BME1 |
Motor de enrutamiento PTX10001
En la Tabla 27 se enumera el motor de enrutamiento admitido en el enrutador PTX10001 (JNP10001-20C).
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| Motor de enrutamiento integrado |
|
18.4R1 |
em0, em2 |
EM1 BME0 |
Motor de enrutamiento PTX10002-60
La Tabla 28 enumera el motor de enrutamiento admitido en el enrutador PTX10002-60.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| Motor de enrutamiento integrado |
|
18.2R1 |
em0, em2 |
EM1 BME0 |
Motores de enrutamiento T320
En la Tabla 29 se enumeran los motores de enrutamiento compatibles con el enrutador T320.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| RE-600-2048 (detalles EOL: TSB14373) |
|
5.3 |
fxp0 |
FXP1 FXP2 |
| RE-1600-2048 (detalles del EOL: TSB14374 |
|
6.2 |
fxp0 |
FXP1 FXP2 |
| RE-A-2000-4096 |
|
8.1 |
fxp0 |
FXP1 FXP2 |
El enrutador T320 admite la tarjeta de control CB-T.
Motores de enrutamiento T640
La Tabla 30 enumera los motores de enrutamiento compatibles con el enrutador T640.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| RE-600-2048 (detalles EOL: TSB14373) |
|
5.3 |
– |
fxp0 |
FXP1 FXP2 |
| RE-1600-2048 (detalles EOL: TSB14374 |
|
6.2 |
– |
fxp0 |
FXP1 FXP2 |
| RE-A-2000-4096 |
|
8.1 |
– |
fxp0 |
em0 BCM0 |
| RE-DUO-C1800-8G |
|
Junos OS de 32 bits en un enrutador T640 independiente: 11.2 Junos OS de 32 bits en un enrutador T640 en una matriz de enrutamiento: 11.4R9 |
Junos OS de 64 bits en un enrutador T640 independiente: 11.3 Junos OS de 64 bits en un enrutador T640 en una matriz de enrutamiento: 11.4R9 |
em0 |
BCM0 EM1 |
| RE-DUO-C1800-16G |
|
Junos OS de 32 bits en un enrutador T640 independiente: 11.4R2 Junos OS de 32 bits en un enrutador T640 en una matriz de enrutamiento: 11.4R9 |
Junos OS de 64 bits en un enrutador T640 independiente: 11.4R2 Junos OS de 64 bits en un enrutador T640 en una matriz de enrutamiento: 11.4R9 |
em0 |
BCM0 EM1 |
El enrutador independiente T640 admite la tarjeta de control CB-T y CB-LCC en una matriz de enrutamiento T640.
Motores de enrutamiento T1600
La Tabla 31 enumera los motores de enrutamiento compatibles con el enrutador T1600.
(Se requieren dos RE-DUO-C1800-8G o dos RE-DUO-C1800-16G para conectarse a una matriz de enrutamiento)
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| RE-600-2048 (detalles EOL: TSB14373) |
|
8.5 |
– |
fxp0 |
FXP1 FXP2 |
| RE-1600-2048 (detalles EOL: TSB14374 |
|
8.5 |
– |
fxp0 |
FXP1 FXP2 |
| RE-A-2000-4096 |
|
8.5 |
– |
fxp0 |
em0 BCM0 |
| RE-DUO-C1800-8G |
|
Junos OS de 32 bits en un enrutador T1600 en una matriz de enrutamiento: 9.6
Nota:
Las versiones 9.6 a 10.4 de Junos OS admiten RE-DUO-C1800-8G solo durante la actualización a un chasis de tarjeta de línea (LCC) en una matriz de enrutamiento. Junos OS de 32 bits en un enrutador T1600 independiente: 11.1 |
Junos OS de 64 bits en un enrutador T1600 en una matriz de enrutamiento: 9.6 Junos OS de 64 bits en un enrutador T1600 independiente: 11.1 |
em0 |
BCM0 EM1 |
| RE-DUO-C1800-16G |
|
Junos OS de 32 bits en un enrutador T1600 independiente: 11.4R2 Junos OS de 32 bits en un enrutador T1600 en una matriz de enrutamiento: 11.4R2 |
Junos OS de 64 bits en un enrutador T1600 independiente: 11.4R2 Junos OS de 64 bits en un enrutador T1600 en una matriz de enrutamiento: 11.4R2 |
em0 |
BCM0 EM1 |
Motores de enrutamiento T4000
En la Tabla 32 se enumeran los motores de enrutamiento compatibles con el enrutador T4000.
El enrutador T4000 solo es compatible con Junos OS de 64 bits.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|
| RE-DUO-C1800-8G |
|
Enrutador T4000 independiente: 12.1 Enrutador T4000 en una matriz de enrutamiento: 13.1 |
em0 |
BCM0 EM1 |
| RE-DUO-C1800-16G |
|
Enrutador T4000 independiente: 12.1R2 Enrutador T4000 en una matriz de enrutamiento: 13.1 |
em0 |
BCM0 EM1 |
El enrutador T4000 admite la tarjeta de control CB-LCC.
Motores de enrutamiento de matriz TX
La Tabla 33 enumera los motores de enrutamiento compatibles con el enrutador TX Matrix.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| RE-600-2048 (detalles EOL: TSB14373) |
|
7.0 |
– |
fxp0 |
FXP1 FXP2 |
| RE-1600-2048 (detalles EOL: TSB14374 |
|
7.0 |
– |
fxp0 |
FXP1 FXP2 |
| RE-A-2000-4096 |
|
8.5 |
– |
fxp0 |
em0 BCM0 |
| RE-DUO-C1800-8G |
|
11.4R9 |
11.4R9 |
em0 |
BCM0 EM1 |
| RE-DUO-C1800-16G |
|
11.4R9 |
11.4R9 |
em0 |
BCM0 EM1 |
El enrutador TXP admite dos tarjetas de control, CB-TX y CB-LCC. El CB-LCC es necesario para los motores de enrutamiento RE-DUO-C1800-8G y RE-DUO-C1800-16G.
Motores de enrutamiento de TX Matrix Plus
La Tabla 34 enumera los motores de enrutamiento compatibles con el enrutador TX Matrix Plus.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| RE-DUO-C2600-16G |
|
Junos OS de 32 bits: 9.6 |
Junos OS de 64 bits: 11.4 |
em0 |
ixgbe0 ixgbe1 |
El enrutador TX Matrix Plus admite la tarjeta de control CB-TXP.
Motores de enrutamiento TX Matrix Plus (con SIB 3D)
La Tabla 35 enumera los motores de enrutamiento compatibles con el enrutador TX Matrix Plus con SIB 3D.
| Número de modelo |
Nombre en la salida de la CLI |
Primera versión compatible de Junos OS de 32 bits |
Primera versión compatible de Junos OS de 64 bits |
Interfaz Ethernet de administración |
Interfaz Ethernet interna |
|---|---|---|---|---|---|
| RE-DUO-C2600-16G |
|
- |
Junos OS de 64 bits: 11.4 |
em0 |
ixgbe0 ixgbe1 |