ON THIS PAGE
Communication Between GPUs on the Same NUMA Node (e.g., GPU1 ↔ GPU2):
Communication Between GPUs on Different NUMA Nodes (e.g., GPU1 ↔ GPU4):
Editing and reapplying the network configuration (netplan) file
Broadcom BCM957608 Thor2 DCQCN configuration for RDMA Traffic
Configuring DCQN-ECN/PFC and TOS/DSCP for RDMA Traffic attributes directly
Configuring DCQN-ECN/PFC and TOS/DSCP for RDMA Traffic attributes using niccli
Non-volatile memory (NVM) options related to class of service.
Configuring DCQCN and RoCE traffic marking values using bnxt_setupcc.sh
Configuring the server to use the management interface for RCCL control traffic:
AMD configuration
The AI servers covered as part of the JVD include 2 Supermicro AS-8125GS-TNMR2 Dual AMD EPYC 8U GPU and 2 Dell PowerEdge XE9680.
This section provides some guidelines to install and configure the interfaces and other relevant parameters based on the AI JVD lab testing. Always refer to the official manufacturer’s documentation when making changes and for more details.
AMD MI300X Setting BIOS Parameters
Each vendor has different BIOS settings based on differences in its UI and GPU mappings and the servers' internal architectures.
SuperMicro AS-8125GS-TNMR2
Boot the server into Setup mode (the boot to supermicro splash will take several minutes to appear):
| UEFI/BIOS Area | Value |
|---|---|
| Advanced -> NB Configuration | ACS Enable = Disable |
| Advanced -> NB Configuration -> xGMI | xGMI Link Width Control = Manual |
| xGMI Force Link Width Control = Force | |
| xGMI Force Link Width = 2 | |
| xGMI Max Link Width control = Manual | |
| xGMI Link Max Speed = Auto | |
| Advanced -> PCIe/PCI/PnP Configuration | Above 4G Encoding: Enabled |
| Re-Size BAR Support: Enabled | |
| SR-IOV Support: Enabled | |
| Workload = Not Configured |
DELL XE9680
The following BIOS settings are recommended by Dell for their XE9680 AI/ML server. The BIOS settings disable IOMMU and ACS on the host as well.
| UEFI/BIOS Area | Value |
|---|---|
| BIOS -> Processor Settings | Logical Processor = Disable |
| Virtualization Technology = Disable | |
| SubNumaCluster = Disable | |
| MADt Core cluster = Linear | |
| 1 BIOS -> Integrated Devices | Global SRIOV = Disable 1 |
| BIOS -> System Profile Setting | Server System Profile = Performance |
| Workload = Not Configured | |
| BIOS -> System Security | AC Recovery Delay = Random (highly recommended) |
1 Dell recommends “enabling” Global SR-IOV, but on the Dell DUTs in this lab setup, this setting was incompatible with the Thor2 NIC port mode 0 for the storage and frontend fabrics (2x200Gb vs. 1x400Gb), causing the DUT to fault on boot. Consult with your Dell account team for recommendations about this setting in your setup.”
Follow the configuration steps described in the Single-node network configuration for AMD Instinct accelerators — GPU cluster networking documentation. Notice that the disable ACS script used in step 6, must also be run before any workloads, after a server has been rebooted.
Ethernet Network Adapter (NICs) for AI Data centers
AI/ML workloads have increased complexity and scale; networking becomes crucial for efficient job completion times. The Network Adapters (NIC) are the connection points that connect the GPUs to the data center fabrics and hence these NICs should be able to handle large amounts of data and should be able to support high-speed, low-latency communications between GPU servers. Due to this at a minimum, the NICs should be able to support some of the key AI/ML functionality such as below:
- RDMA over Converged Ethernet (RoCE) and congestion control.
- Ability to handle 400G data bidirectional with low latency.
- Advanced congestion control mechanisms that are sensitive and able to react to network congestion and optimize traffic flow.
- Support GPU scalability ensuring robust performance even with increasing GPUs.
For Server NICs, we have two options:
- Broadcom Thor2—The Broadcom Thor2 network adapters were validated for AI/ML workloads and job completion times.
- AMD Pollara—AMD Pollara 400 ethernet network adapters
For more information on AMD Pensando Pollara 400 (ethernet adapter) refer to this link.
Identifying NICs and GPUs mappings
Along with the fabric and GPU server setup, this JVD covers the configuration and setup of ethernet Network Adapters (or NIC) as below. The Broadcom BCM957608 (Thor2) ethernet network adapter was validated in Phase 1. And in Phase2, the AMD Pollara 400 NIC cards are validated.
All 4 servers are equipped with:
- 8 x AMD Instinct MI300X OAM GPUs
and either of the below NICs
- 8 x Single port 400/200/100/50/25/10GbE Broadcom BCM957608 (Thor2) adapter with 400Gbps QDD-400G-DR4 transceivers used to connect to the GPU backend Fabric.
Or
- 8 x Single port 400G and 2 ports 200G and 4 ports 100/50/25G AMD Pensando Pollara 400 ethernet network adapter with Q112-400G-DR4 transceivers used to connect to the GPU backend Fabric.
Dell devices:
- 1 x Mellanox MT2910 Family NVIDIA® ConnectX®-7 SmartNIC with 100Gbps QSFP28 transceivers to connect to the Frontend Fabric
- 2 x Mellanox MT2910 Family NVIDIA® ConnectX®-7 SmartNIC with 200Gbps QDD-2X200G-AOC-5M transceivers to connect to the Frontend Fabric
AMD MI300x GPU Server and NIC Firmware and RCCL libraries
For the purposes of Broadcom Thor 2 NIC validation following are the main OS and firmware versions configured on the MI300x GPU servers:
Broadcom Thor 2 Ethernet Adapter
Below are the details of the Operating System (OS), firmware and AMD libraries installed:
| OS/Firmware | Version |
|---|---|
| Ubuntu | Ubuntu 24.04.2 LTS |
| Broadcom Thor2 NIC Firmware version | 231.2.63.0 |
Following are the libraries installed for RCCL test for Thor2 Network adapter:
| RCCL Test libraries | Version | command |
|---|---|---|
| rocm/noble | 6.4.0.60400-47~24.04 amd64 | apt list rocm |
| Rccl 1 | 2.22.3.60400-47~24.04 amd64 | apt list rccl |
| mpi (Open MPI) | 5.0.8a1 | mpirun –version |
|
UCX |
1.15.0 | /opt/ucx/bin/ucx_info -v |
AMD Pensando Pollara 400 Ethernet Adapter
For the purposes of the AMD Pollara 400 NIC validation, the following are the main OS and firmware versions configured on the MI300x GPU servers:
| OS/Firmware | Version |
|---|---|
| Ubuntu | Ubuntu 22.04.5 LTS |
| AMD Pollara NIC Firmware version | 1.110.0-a-79 |
Output of the ubuntu version 22.04 installed on the MI300 servers.
-
jnpr@mi300-01:~$ cat /etc/os-release PRETTY_NAME="Ubuntu 22.04.5 LTS" NAME="Ubuntu" VERSION_ID="22.04" VERSION="22.04.5 LTS (Jammy Jellyfish)" VERSION_CODENAME=jammy ID=ubuntu ID_LIKE=debian HOME_URL="https://www.ubuntu.com/" SUPPORT_URL="https://help.ubuntu.com/" BUG_REPORT_URL="https://bugs.launchpad.net/ubuntu/" PRIVACY_POLICY_URL="https://www.ubuntu.com/legal/terms-and-policies/privacy-policy"
Output of the AMD Pollara 400 NIC card Firmware version
-
jnpr@mi300-01:~$ sudo nicctl show card --detail | grep Firmware Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79
Following are the libraries installed for RCCL test for AMD Pollara 400 NIC adapter:
| RCCL Test libraries | Version | command |
|---|---|---|
| rocm/jammy | 6.3.3.60303-74~22.04 amd64 | apt list rocm |
| Rccl 1 | 7961624 | |
| mpi (Open MPI) | 5.1.0a1 | /opt/ompi/bin/mpirun –version |
|
UCX |
1.20.0 | /opt/ucx/bin/ucx_info -v |
| rccl-tests | revision 6704fc6 | Git branch https://github.com/ROCm/rccl-tests.git |
| ANP Plugin2 |
For more information on installing these software and dependent libraries, high level steps are provided later in section AMD Pollara firmware and dependent libraries, as these steps can only be performed once the NICs and GPUs are mapped as described in sections below.
In this section, we will explore some of the options to find information about and configure the NICs and GPUs.
ROCm Communication Collectives Library (RCCL)
In AMD servers, the ROCm provides multi-GPU and multi-node collective communication primitives optimized for AMD GPUs. These collectives implement send and receive operations such as all-reduce, all-gather, reduce, broadcast, all-to-all, and so on across multiple GPUs in one or more GPU servers.
Communication between GPUs on a single server is implemented using xGMI (inter-chip global memory interconnect), part of AMD's Infinity Fabric technology. The Infinity Fabric is a high-bandwidth, low-latency interconnect for the various components within a system including CPUs, GPUs, memory, NICs, and other devices. xGMI provides socket-to-socket communication, allowing direct CPU-to-CPU or GPU-to-GPU communication.
Communication between different servers is processed by RDMA-capable NICs (e.g., RoCEv2 over Ethernet) and routed across the GPU backend fabric. These NICs can be used by any GPU at any time as there is no hard coded 1-to-1 GPU to NIC mapping. However, the use of preferred communication paths between GPUs and NICs creates the appearance of a 1:1 correspondence.
RCCL will always choose the path that has the best connection between GPUs and between GPUs and NICs, aiming to optimize bandwidth, and latency. Optimized intra-node path will be taken before forwarding inter-node.
The rocm-smi (Radeon Open Compute Platform System
Management Interface) cli provides tools for configuring and
monitoring AMD GPUs. It can be used to identify GPUs hardware
details as well as topology information using the options such
as:
--showproductname: show product details
--showtopo
:
show hardware topology information
--showtopoaccess
:
shows the link accessibility between GPUs
--showtopohops
:
shows the number of hops between GPUs
--showtopotype
:
shows the link type between GPUs
--showtoponuma
:
shows the numa nodes
--shownodesbw: shows the numa nodes bandwidth
--showhw: shows the hardware details
Examples from AMD Instinct MI300X OAM:
The --showproductname shows the GPU series, model,
and vendor along with additional details. The example output shows
AMD
Instinct™ MI300X Platform GPUs are installed in the
server.
-
jnpr@MI300X-01:/proc$ rocm-smi --showproductname ============================ ROCm System Management Interface ============================ ====================================== Product Info ====================================== GPU[0] : Card Series: AMD Instinct MI300X OAM GPU[0] : Card Model: 0x74a1 GPU[0] : Card Vendor: Advanced Micro Devices, Inc. [AMD/ATI] GPU[0] : Card SKU: M3000100 GPU[0] : Subsystem ID: 0x74a1 GPU[0] : Device Rev: 0x00 GPU[0] : Node ID: 2 GPU[0] : GUID: 28851 GPU[0] : GFX Version: gfx942 GPU[1] : Card Series: AMD Instinct MI300X OAM GPU[1] : Card Model: 0x74a1 GPU[1] : Card Vendor: Advanced Micro Devices, Inc. [AMD/ATI] GPU[1] : Card SKU: M3000100 GPU[1] : Subsystem ID: 0x74a1 GPU[1] : Device Rev: 0x00 GPU[1] : Node ID: 3 GPU[1] : GUID: 51499 GPU[1] : GFX Version: gfx942 ---more--
The --showhw options shows information about the
GPUs in the system, including ID
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# rocm-smi --showhw -v ====================================== ROCm System Management Interface ================================= =========================================== Concise Hardware Info ======================================= GPU NODE DID GUID GFX VER GFX RAS SDMA RAS UMC RAS VBIOS BUS PARTITION ID 0 2 0x74a1 28851 gfx942 ENABLED ENABLED ENABLED 113-M3000100-102 0000:05:00.0 0 1 3 0x74a1 51499 gfx942 ENABLED ENABLED ENABLED 113-M3000100-102 0000:27:00.0 0 2 4 0x74a1 57603 gfx942 ENABLED ENABLED ENABLED 113-M3000100-102 0000:47:00.0 0 3 5 0x74a1 22683 gfx942 ENABLED ENABLED ENABLED 113-M3000100-102 0000:65:00.0 0 4 6 0x74a1 53458 gfx942 ENABLED ENABLED ENABLED 113-M3000100-102 0000:85:00.0 0 5 7 0x74a1 26954 gfx942 ENABLED ENABLED ENABLED 113-M3000100-102 0000:A7:00.0 0 6 8 0x74a1 16738 gfx942 ENABLED ENABLED ENABLED 113-M3000100-102 0000:C7:00.0 0 7 9 0x74a1 63738 gfx942 ENABLED ENABLED ENABLED 113-M3000100-102 0000:E5:00.0 0 ========================================================================================================== ============================================ End of ROCm SMI Log ========================================= ========================================= VBIOS ========================================== GPU[0] : VBIOS version: 113-M3000100-102 GPU[1] : VBIOS version: 113-M3000100-102 GPU[2] : VBIOS version: 113-M3000100-102 GPU[3] : VBIOS version: 113-M3000100-102 GPU[4] : VBIOS version: 113-M3000100-102 GPU[5] : VBIOS version: 113-M3000100-102 GPU[6] : VBIOS version: 113-M3000100-102 GPU[7] : VBIOS version: 113-M3000100-102 ==========================================================================================
The fields are defined as follows:
| GPU | Index of the GPU on the system, starting from 0. |
| NODE | NUMA (Non-Uniform Memory Access) node ID associated with the GPU. Helps identify memory locality. Optimal GPU/NIC mapping often relies on NUMA proximity |
| DID |
Device ID of the GPU. This is a unique identifier for the specific GPU model. Useful for verifying the exact GPU model. For example, 0x74a1 corresponds to an MI300X-series GPU. |
| GUID |
GPU Unique Identifier. This value is specific to each GPU and may relate to its PCIe device. Useful for distinguishing GPUs in a multi-GPU environment. |
| GFX VER |
The version of the GPU architecture (e.g., gfx942 is part of AMD's RDNA2 family). In AMD GPUs, the GFX prefix is part of AMD's internal naming convention for their GPU microarchitecture families. GPU architecture hardware specifications — ROCm Documentation |
| GFX RAS | Status of GPU RAS (Reliability, Availability, Serviceability) features. Indicates error handling. |
| SDMA RAS | Status of SDMA (System Direct Memory Access) RAS features. |
| UMC RAS | Status of Unified Memory Controller (UMC) RAS features. |
| VBIOS |
VBIOS (Video BIOS) version. Indicates the firmware version running on the GPU. Identical firmware version (113-M3000100-102) for all GPUs indicates a uniform configuration. |
| BUS |
PCIe bus address of the GPU. Helps map the GPU to its physical slot. For example, 0000:05:00.0 is the PCIe address. It allows you to correlate GPUs to physical slots or NUMA nodes. |
| PARTITION ID | GPU partition or instance ID. For multi-instance GPUs (e.g., MI300X), this would identify instances.All values are 0 indicating no multi-instance partitioning is enabled for these GPUs. |
The --showbus options show PCI bus related
information, including correspondence between GPU IDs and PCI Bus
IDs.
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# rocm-smi --showbus -i ============================ ROCm System Management Interface ============================ =========================================== ID =========================================== GPU[0] : Device Name: AMD Instinct MI300X OAM GPU[0] : Device ID: 0x74a1 GPU[0] : Device Rev: 0x00 GPU[0] : Subsystem ID: 0x74a1 GPU[0] : GUID: 28851 GPU[1] : Device Name: AMD Instinct MI300X OAM GPU[1] : Device ID: 0x74a1 GPU[1] : Device Rev: 0x00 GPU[1] : Subsystem ID: 0x74a1 GPU[1] : GUID: 51499 GPU[2] : Device Name: AMD Instinct MI300X OAM GPU[2] : Device ID: 0x74a1 GPU[2] : Device Rev: 0x00 GPU[2] : Subsystem ID: 0x74a1 GPU[2] : GUID: 57603 ---more--- ========================================================================================== ======================================= PCI Bus ID ======================================= GPU[0] : PCI Bus: 0000:05:00.0 GPU[1] : PCI Bus: 0000:27:00.0 GPU[2] : PCI Bus: 0000:47:00.0 GPU[3] : PCI Bus: 0000:65:00.0 GPU[4] : PCI Bus: 0000:85:00.0 GPU[5] : PCI Bus: 0000:A7:00.0 GPU[6] : PCI Bus: 0000:C7:00.0 GPU[7] : PCI Bus: 0000:E5:00.0 ========================================================================================== ================================== End of ROCm SMI Log ===================================
The --showmetrics option provides comprehensive
information about the GPU status and performance, including metrics
such as temperature, clock frequency, power, and pcie
bandwidth.
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# rocm-smi --showmetrics | grep GPU.0 GPU[0] : Metric Version and Size (Bytes): 1.6 1664 GPU[0] : temperature_edge (C): N/A GPU[0] : temperature_hotspot (C): 42 GPU[0] : temperature_mem (C): 35 GPU[0] : temperature_vrgfx (C): N/A GPU[0] : temperature_vrsoc (C): 41 GPU[0] : temperature_vrmem (C): N/A GPU[0] : average_gfx_activity (%): 0 GPU[0] : average_umc_activity (%): 0 GPU[0] : average_mm_activity (%): N/A GPU[0] : average_socket_power (W): N/A GPU[0] : energy_accumulator (15.259uJ (2^-16)): 4291409153508 GPU[0] : system_clock_counter (ns): 508330314785091 GPU[0] : average_gfxclk_frequency (MHz): N/A GPU[0] : average_socclk_frequency (MHz): N/A GPU[0] : average_uclk_frequency (MHz): N/A GPU[0] : average_vclk0_frequency (MHz): N/A GPU[0] : average_dclk0_frequency (MHz): N/A GPU[0] : average_vclk1_frequency (MHz): N/A GPU[0] : average_dclk1_frequency (MHz): N/A GPU[0] : current_gfxclk (MHz): 134 GPU[0] : current_socclk (MHz): 28 GPU[0] : current_uclk (MHz): 900 GPU[0] : current_vclk0 (MHz): 29 GPU[0] : current_dclk0 (MHz): 22 GPU[0] : current_vclk1 (MHz): 29 GPU[0] : current_dclk1 (MHz): 22 GPU[0] : throttle_status: N/A GPU[0] : current_fan_speed (rpm): N/A GPU[0] : pcie_link_width (Lanes): 16 GPU[0] : pcie_link_speed (0.1 GT/s): 320 GPU[0] : gfx_activity_acc (%): 682809151 GPU[0] : mem_activity_acc (%): 60727622 GPU[0] : temperature_hbm (C): ['N/A', 'N/A', 'N/A', 'N/A'] GPU[0] : firmware_timestamp (10ns resolution): 507863813273800 GPU[0] : voltage_soc (mV): N/A GPU[0] : voltage_gfx (mV): N/A GPU[0] : voltage_mem (mV): N/A GPU[0] : indep_throttle_status: N/A GPU[0] : current_socket_power (W): 123 GPU[0] : vcn_activity (%): [0, 0, 0, 0] GPU[0] : gfxclk_lock_status: 0 GPU[0] : xgmi_link_width: 0 GPU[0] : xgmi_link_speed (Gbps): 0 GPU[0] : pcie_bandwidth_acc (GB/s): 626812796806 GPU[0] : pcie_bandwidth_inst (GB/s): 18 ---more---
The --showtopo options show how the GPUs in the
systems can communicate with each other via XGMI (Link Type)
representing one hop between any two GPUs. The weight of 15
indicates this direct communication is the preferred path.
-
jnpr@MI300X-01:~$ rocm-smi --showtopo ============================ ROCm System Management Interface ============================ ================================ Weight between two GPUs ================================= GPU0 GPU1 GPU2 GPU3 GPU4 GPU5 GPU6 GPU7 GPU0 0 15 15 15 15 15 15 15 GPU1 15 0 15 15 15 15 15 15 GPU2 15 15 0 15 15 15 15 15 GPU3 15 15 15 0 15 15 15 15 GPU4 15 15 15 15 0 15 15 15 GPU5 15 15 15 15 15 0 15 15 GPU6 15 15 15 15 15 15 0 15 GPU7 15 15 15 15 15 15 15 0 ================================= Hops between two GPUs ================================== GPU0 GPU1 GPU2 GPU3 GPU4 GPU5 GPU6 GPU7 GPU0 0 1 1 1 1 1 1 1 GPU1 1 0 1 1 1 1 1 1 GPU2 1 1 0 1 1 1 1 1 GPU3 1 1 1 0 1 1 1 1 GPU4 1 1 1 1 0 1 1 1 GPU5 1 1 1 1 1 0 1 1 GPU6 1 1 1 1 1 1 0 1 GPU7 1 1 1 1 1 1 1 0 =============================== Link Type between two GPUs =============================== GPU0 GPU1 GPU2 GPU3 GPU4 GPU5 GPU6 GPU7 GPU0 0 XGMI XGMI XGMI XGMI XGMI XGMI XGMI GPU1 XGMI 0 XGMI XGMI XGMI XGMI XGMI XGMI GPU2 XGMI XGMI 0 XGMI XGMI XGMI XGMI XGMI GPU3 XGMI XGMI XGMI 0 XGMI XGMI XGMI XGMI GPU4 XGMI XGMI XGMI XGMI 0 XGMI XGMI XGMI GPU5 XGMI XGMI XGMI XGMI XGMI 0 XGMI XGMI GPU6 XGMI XGMI XGMI XGMI XGMI XGMI 0 XGMI GPU7 XGMI XGMI XGMI XGMI XGMI XGMI XGMI 0 ======================================= Numa Nodes ======================================= GPU[0] : (Topology) Numa Node: 0 GPU[0] : (Topology) Numa Affinity: 0 GPU[1] : (Topology) Numa Node: 0 GPU[1] : (Topology) Numa Affinity: 0 GPU[2] : (Topology) Numa Node: 0 GPU[2] : (Topology) Numa Affinity: 0 GPU[3] : (Topology) Numa Node: 0 GPU[3] : (Topology) Numa Affinity: 0 GPU[4] : (Topology) Numa Node: 1 GPU[4] : (Topology) Numa Affinity: 1 GPU[5] : (Topology) Numa Node: 1 GPU[5] : (Topology) Numa Affinity: 1 GPU[6] : (Topology) Numa Node: 1 GPU[6] : (Topology) Numa Affinity: 1 GPU[7] : (Topology) Numa Node: 1 GPU[7] : (Topology) Numa Affinity: 1 ================================== End of ROCm SMI Log =================================== Usage: cma_roce_tos OPTIONS Options: -h show this help -d <dev> use IB device <dev> (default mlx5_0) -p <port> use port <port> of IB device (default 1) -t <TOS> set TOS of RoCE RDMA_CM applications (0)
The link type, number of hops, and weight can be also obtained
using the specific options
--showtopoweight
,
--showtopotype, and
–showtopoweight:
-
jnpr@MI300X-01:~/SCRIPTS$ rocm-smi --showtopoweight ============================ ROCm System Management Interface ============================ ================================ Weight between two GPUs ================================= GPU0 GPU1 GPU2 GPU3 GPU4 GPU5 GPU6 GPU7 GPU0 0 15 15 15 15 15 15 15 GPU1 15 0 15 15 15 15 15 15 GPU2 15 15 0 15 15 15 15 15 GPU3 15 15 15 0 15 15 15 15 GPU4 15 15 15 15 0 15 15 15 GPU5 15 15 15 15 15 0 15 15 GPU6 15 15 15 15 15 15 0 15 GPU7 15 15 15 15 15 15 15 0 ================================== End of ROCm SMI Log =================================== jnpr@MI300X-01:~/SCRIPTS$ rocm-smi --showtopohops ============================ ROCm System Management Interface ============================ ================================= Hops between two GPUs ================================== GPU0 GPU1 GPU2 GPU3 GPU4 GPU5 GPU6 GPU7 GPU0 0 1 1 1 1 1 1 1 GPU1 1 0 1 1 1 1 1 1 GPU2 1 1 0 1 1 1 1 1 GPU3 1 1 1 0 1 1 1 1 GPU4 1 1 1 1 0 1 1 1 GPU5 1 1 1 1 1 0 1 1 GPU6 1 1 1 1 1 1 0 1 GPU7 1 1 1 1 1 1 1 0 ================================== End of ROCm SMI Log =================================== jnpr@MI300X-01:~/SCRIPTS$ rocm-smi --showtopotype ============================ ROCm System Management Interface ============================ =============================== Link Type between two GPUs =============================== GPU0 GPU1 GPU2 GPU3 GPU4 GPU5 GPU6 GPU7 GPU0 0 XGMI XGMI XGMI XGMI XGMI XGMI XGMI GPU1 XGMI 0 XGMI XGMI XGMI XGMI XGMI XGMI GPU2 XGMI XGMI 0 XGMI XGMI XGMI XGMI XGMI GPU3 XGMI XGMI XGMI 0 XGMI XGMI XGMI XGMI GPU4 XGMI XGMI XGMI XGMI 0 XGMI XGMI XGMI GPU5 XGMI XGMI XGMI XGMI XGMI 0 XGMI XGMI GPU6 XGMI XGMI XGMI XGMI XGMI XGMI 0 XGMI GPU7 XGMI XGMI XGMI XGMI XGMI XGMI XGMI 0 ================================== End of ROCm SMI Log ===================================
The --shownodesbw shows the bandwidth available
internally for GPU to GPU internal
communication:
-
jnpr@MI300X-01:/home/ben$ rocm-smi --shownodesbw ============================ ROCm System Management Interface ============================ ======================================= Bandwidth ======================================== GPU0 GPU1 GPU2 GPU3 GPU4 GPU5 GPU6 GPU7 GPU0 N/A 50000-50000 50000-50000 50000-50000 50000-50000 50000-50000 50000-50000 50000-50000 GPU1 50000-50000 N/A 50000-50000 50000-50000 50000-50000 50000-50000 50000-50000 50000-50000 GPU2 50000-50000 50000-50000 N/A 50000-50000 50000-50000 50000-50000 50000-50000 50000-50000 GPU3 50000-50000 50000-50000 50000-50000 N/A 50000-50000 50000-50000 50000-50000 50000-50000 GPU4 50000-50000 50000-50000 50000-50000 50000-50000 N/A 50000-50000 50000-50000 50000-50000 GPU5 50000-50000 50000-50000 50000-50000 50000-50000 50000-50000 N/A 50000-50000 50000-50000 GPU6 50000-50000 50000-50000 50000-50000 50000-50000 50000-50000 50000-50000 N/A 50000-50000 GPU7 50000-50000 50000-50000 50000-50000 50000-50000 50000-50000 50000-50000 50000-50000 N/A Format: min-max; Units: mps "0-0" min-max bandwidth indicates devices are not connected directly ================================== End of ROCm SMI Log ===================================
rocm-smi -h
For more information about ROCm-SMI as well as for the newer AMD-SMI cli please check: ROCm Documentation, AMD SMI documentation, ROCm and AMD SMI
NICs and GPUs mappings
Next is to perform mapping of the NIC to GPUs as shown in the below steps. These will be the same for both Thor2 and AMD Pollara 400 NIC.
The information from other commands can be combined with some of the options above to find correlation between GPU and NICs following these steps:
-
Identify NUMA Nodes and GPUs
Use the output from
rocm-smi --showtoponumaor justrocm-smi --showtopoto find mappings between GPUs and NUMA nodes.Look for NUMA Affinity for each GPU in the output. A description of what this attribute means is included later in this section.
Note which GPUs are associated with which NUMA nodes.
Example:
-
jnpr@MI300X-01:/proc$ rocm-smi --showtoponuma ============================ ROCm System Management Interface ============================ ======================================= Numa Nodes ======================================= GPU[0] : (Topology) Numa Node: 0 GPU[0] : (Topology) Numa Affinity: 0 GPU[1] : (Topology) Numa Node: 0 GPU[1] : (Topology) Numa Affinity: 0 GPU[2] : (Topology) Numa Node: 0 GPU[2] : (Topology) Numa Affinity: 0 GPU[3] : (Topology) Numa Node: 0 GPU[3] : (Topology) Numa Affinity: 0 GPU[4] : (Topology) Numa Node: 1 GPU[4] : (Topology) Numa Affinity: 1 GPU[5] : (Topology) Numa Node: 1 GPU[5] : (Topology) Numa Affinity: 1 GPU[6] : (Topology) Numa Node: 1 GPU[6] : (Topology) Numa Affinity: 1 GPU[7] : (Topology) Numa Node: 1 GPU[7] : (Topology) Numa Affinity: 1 ================================== End of ROCm SMI Log ===================================
GPU 0–3 → NUMA Node 0
GPU 4–7 → NUMA Node 1
-
- Identify NUMA Nodes for NICs
Navigate to the
/sys/class/net/directory and check the NUMA node affinity for each network interface (excluding lo or docker interfaces):-
for iface in $(ls /sys/class/net/ | grep -Ev '^(lo|docker)'); do numa_node=$(cat /sys/class/net/$iface/device/numa_node 2>/dev/null) echo "Interface: $iface, NUMA Node: $numa_node" done
Note the NUMA node affinity for each NIC interface.
EXAMPLE:
-
jnpr@MI300X-01:~/SCRIPTS$ for iface in $(ls /sys/class/net/ | grep -Ev '^(lo|docker)'); do numa_node=$(cat /sys/class/net/$iface/device/numa_node 2>/dev/null) echo "Interface: $iface, NUMA Node: $numa_node" done Interface: ens61f1np1, NUMA Node: 1 Interface: enxbe3af2b6059f, NUMA Node: Interface: gpu0_eth, NUMA Node: 0 Interface: gpu1_eth, NUMA Node: 0 Interface: gpu2_eth, NUMA Node: 0 Interface: gpu3_eth, NUMA Node: 0 Interface: gpu4_eth, NUMA Node: 1 Interface: gpu5_eth, NUMA Node: 1 Interface: gpu6_eth, NUMA Node: 1 Interface: gpu7_eth, NUMA Node: 1 Interface: mgmt_eth, NUMA Node: 1 Interface: stor0_eth, NUMA Node: 0 Interface: stor1_eth, NUMA Node: 0
-
- Correlate GPUs to NICs Based on NUMA Affinity
Using the NUMA node affinity from Step 1 (GPUs) and Step 2 (NICs), to map each GPU to NICs within the same NUMA node:
EXAMPLE:
-
GPU0 (NUMA 0): - NIC: gpu0_eth (NUMA 0) - NIC: gpu1_eth (NUMA 0) - NIC: gpu2_eth (NUMA 0) - NIC: gpu3_eth (NUMA 0) - NIC: stor0_eth (NUMA 0) - NIC: stor1_eth (NUMA 0) GPU4 (NUMA 1): - NIC: gpu4_eth (NUMA 1) - NIC: gpu5_eth (NUMA 1) - NIC: gpu6_eth (NUMA 1) - NIC: gpu7_eth (NUMA 1) - NIC: mgmt_eth (NUMA 1)
-
jnpr@MI300X-01:~/SCRIPTS$ cat GPU-to-NIC_YL.sh #!/bin/bash # Temporary data files gpu_to_numa_file="GPU-to-NUMA.tmp" nic_to_numa_file="NIC-to-NUMA.tmp" output_file="NIC-to-GPU.txt" # Clear or create the output file > "$output_file" # Step 1: Parse GPUs and NUMA nodes echo "Step 1: Parsing GPUs and NUMA Nodes..." rocm-smi --showtoponuma > /tmp/rocm_smi_output.tmp 2>/dev/null if [[ $? -ne 0 ]]; then echo "Error: rocm-smi is not installed or failed to run." exit 1 fi # Extract GPU and NUMA information grep "GPU" /tmp/rocm_smi_output.tmp | grep "Numa Node" | awk -F'[ :]' '{print $2, $NF}' | sed 's/^/GPU /' > "$gpu_to_numa_file" # Step 2: Parse NICs and NUMA nodes echo "Step 2: Parsing NICs and NUMA Nodes..." > "$nic_to_numa_file" for iface in $(ls /sys/class/net/ | grep -Ev '^(lo|docker)'); do numa_node=$(cat /sys/class/net/$iface/device/numa_node 2>/dev/null) if [[ $numa_node -ge 0 ]]; then echo "NIC $iface, NUMA Node: $numa_node" >> "$nic_to_numa_file" fi done # Step 3: Match GPUs to NICs based on NUMA affinity echo "Step 3: Mapping GPUs to NICs..." while read -r gpu_entry; do gpu=$(echo "$gpu_entry" | awk '{print $2}') gpu_numa=$(echo "$gpu_entry" | awk '{print $NF}') echo "GPU$gpu (NUMA $gpu_numa):" >> "$output_file" while read -r nic_entry; do nic=$(echo "$nic_entry" | awk '{print $2}' | sed 's/,//') nic_numa=$(echo "$nic_entry" | awk '{print $NF}') if [[ "$gpu_numa" == "$nic_numa" ]]; then echo " - NIC: $nic" >> "$output_file" fi done < "$nic_to_numa_file" done < "$gpu_to_numa_file" # Output the result echo "Mapping complete! Results saved in $output_file." cat "$output_file"
EXAMPLE:
-
jnpr@MI300X-01:~/SCRIPTS$ ./GPU-to-NIC_YL.sh Step 1: Parsing GPUs and NUMA Nodes... Step 2: Parsing NICs and NUMA Nodes... Step 3: Mapping GPUs to NICs... Mapping complete! Results saved in NIC-to-GPU.txt. GPU0 (NUMA 0): - NIC: gpu0_eth - NIC: gpu1_eth - NIC: gpu2_eth - NIC: gpu3_eth - NIC: stor0_eth - NIC: stor1_eth GPU0 (NUMA 0): - NIC: gpu0_eth - NIC: gpu1_eth - NIC: gpu2_eth - NIC: gpu3_eth - NIC: stor0_eth - NIC: stor1_eth GPU0 (NUMA 0): - NIC: gpu0_eth - NIC: gpu1_eth - NIC: gpu2_eth - NIC: gpu3_eth - NIC: stor0_eth - NIC: stor1_eth GPU0 (NUMA 0): - NIC: gpu0_eth - NIC: gpu1_eth - NIC: gpu2_eth - NIC: gpu3_eth - NIC: stor0_eth - NIC: stor1_eth GPU1 (NUMA 1): - NIC: ens61f1np1 - NIC: gpu4_eth - NIC: gpu5_eth - NIC: gpu6_eth - NIC: gpu7_eth - NIC: mgmt_eth GPU1 (NUMA 1): - NIC: ens61f1np1 - NIC: gpu4_eth - NIC: gpu5_eth - NIC: gpu6_eth - NIC: gpu7_eth - NIC: mgmt_eth GPU1 (NUMA 1): - NIC: ens61f1np1 - NIC: gpu4_eth - NIC: gpu5_eth - NIC: gpu6_eth - NIC: gpu7_eth - NIC: mgmt_eth GPU1 (NUMA 1): - NIC: ens61f1np1 - NIC: gpu4_eth - NIC: gpu5_eth - NIC: gpu6_eth - NIC: gpu7_eth - NIC: mgmt_eth
You will notice that there is not a 1:1 GPU to NIC association. Instead, multiple NIC interfaces are associated with the GPU. This is because they belong to the same Non-Uniform Memory Access (NUMA) node affinity.
Systems employing a NUMA architecture contain collections of hardware resources including CPUs, GPUs memory, and PCIe devices (including NICs), grouped together in what is known as a “NUMA node”. These resources are considered "local" to each other. From the point of view of a GPU, devices in the same NUMA node are the most closely associated with that GPU. The NUMA node is identified by the NUMA Affinity.
Multiple NICs and GPUs may be connected to the same PCIe complex or switch within a NUMA node. This makes the NICs accessible to all GPUs sharing that complex. However, while all NICs in a NUMA node are accessible to any GPU in the same node, the NICs are allocated dynamically for usage by a given GPU, based on availability, traffic type, latency, and so on.
Communication Between GPUs on the Same NUMA Node (e.g., GPU1 ↔ GPU2):
GPUs on the same NUMA node (e.g., GPU1 and GPU2) communicate directly over the high-bandwidth, low-latency interconnect, such as Infinity Fabric (in AMD systems).
These interconnects avoid the CPU and main memory entirely, offering much faster communication compared to NUMA-crossing communication. Since both GPUs are "local" to the same memory controller and CPU, the communication path is highly optimized.
Communication Between GPUs on Different NUMA Nodes (e.g., GPU1 ↔ GPU4):
Communication between GPUs on different NUMA nodes (e.g., GPU1 on NUMA 0 and GPU4 on NUMA 1) must traverse additional layers of the system architecture, which introduces higher latency. The path typically follows:
- GPU1 → CPU (NUMA 0): Data is sent from GPU1 to the CPU on NUMA 0.
- Inter-NUMA Link: The CPUs in NUMA 0 and NUMA 1 are connected via an interconnect such as Infinity Fabric or UPI (Ultra Path Interconnect).
- CPU (NUMA 1) → GPU4: The data is forwarded from the CPU on NUMA 1 to GPU4.
Changing NIC attributes
This section shows you how to add or change a NIC’s Interface Name, MTU, DNS, IP Addresses and Routing table entries.
Editing and reapplying the network configuration (netplan) file
The network configuration is described in the netplan *.yaml
file found under: /etc/netplan/.
Notice that the actual file name might vary. Examples:
/etc/netplan/01-netcfg.yaml
/etc/netplan/00-installer-config.yaml
Changing any interface attribute involves editing this file and reapplying the network plan as shown below:
- Find the default names of the logical interfaces.
You can use the following steps to achieve this:
Thor2 NIC output:
-
jnpr@MI300X-01:~$ > devnames1; for iface in $(ls /sys/class/net/ | grep -Ev '^(lo|docker|virbr)'); do device=$(ethtool -i $iface 2>/dev/null | grep 'bus-info' | awk '{print $2}'); if [[ $device != 0000:* ]]; then device="0000:$device"; fi; model=$(lspci -s $device 2>/dev/null | awk -F ': ' '{print $2}'); echo "$iface:$model" >> devnames1; done jnpr@MI300X-01:~$ cat devnames1 ens61f1np1:Mellanox Technologies MT2910 Family [ConnectX-7] enxbe3af2b6059f: ens41np0:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) ens42np0:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) ens32np0:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) ens31np0:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) ens21np0:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) ens22np0:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) ens12np0:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) ens11np0:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) ens61f0np0:Mellanox Technologies MT2910 Family [ConnectX-7] ens50f0np0:Mellanox Technologies MT2910 Family [ConnectX-7] ens50f1np1:Mellanox Technologies MT2910 Family [ConnectX-7]
Interface
ens31np0:Where
- en: ethernet network interface.
- s31: indicates the physical location of the network interface on the system bus. slot number 31 on the bus.
- np0:
- n: Network (indicates it's a network port).
- p0: Port 0 (indicates it's the first port of this network interface).
AMD Pollara 400 NIC output
-
jnpr@mi300-01:~# > devnames1; for iface in $(ls /sys/class/net/ | grep -Ev '^(lo|docker|virbr)'); do device=$(ethtool -i $iface 2>/dev/null | grep 'bus-info' | awk '{print $2}'); if [[ $device != 0000:* ]]; then device="0000:$device"; fi; model=$(lspci -s $device 2>/dev/null | awk -F ': ' '{print $2}'); echo "$iface:$model" >> devnames1; done jnpr@mi300-01:~# cat devnames1 ens61f1np1:Mellanox Technologies MT2910 Family [ConnectX-7] eth3: gpu0_eth:Pensando Systems DSC Ethernet Controller gpu1_eth:Pensando Systems DSC Ethernet Controller gpu2_eth:Pensando Systems DSC Ethernet Controller gpu3_eth:Pensando Systems DSC Ethernet Controller gpu4_eth:Pensando Systems DSC Ethernet Controller gpu5_eth:Pensando Systems DSC Ethernet Controller gpu6_eth:Pensando Systems DSC Ethernet Controller gpu7_eth:Pensando Systems DSC Ethernet Controller mgmt_eth:Mellanox Technologies MT2910 Family [ConnectX-7] stor0_eth:Mellanox Technologies MT2910 Family [ConnectX-7] stor1_eth:Mellanox Technologies MT2910 Family [ConnectX-7]
You can use the script
gpunic.pyto find mappings between GPUs and NIC per pcie bus, to identify how the NICS need to be renamed for consistency.EXAMPLE:
-
jnpr@MI300X-01:~/SCRIPTS$ sudo python3 amd_map_nic_gpu.py bus 0000:00:01.1: 0000:05:00.0 (gpu) - GPU0 0000:08:00.0 (gpu) - - 0000:08:00.1 (gpu) - - 0000:08:00.2 (gpu) - - 0000:09:00.0 (nic) - gpu0_eth bus 0000:20:01.1: 0000:25:00.0 (gpu) - - 0000:25:00.1 (gpu) - - 0000:25:00.2 (gpu) - - 0000:26:00.0 (nic) - gpu1_eth 0000:29:00.0 (gpu) - GPU1 bus 0000:20:03.1: 0000:31:00.0 (nic) - stor0_eth 0000:31:00.1 (nic) - stor1_eth bus 0000:40:01.1: 0000:45:00.0 (gpu) - - 0000:45:00.1 (gpu) - - 0000:45:00.2 (gpu) - - 0000:46:00.0 (nic) - gpu2_eth 0000:49:00.0 (gpu) - GPU2 bus 0000:60:01.1: 0000:65:00.0 (gpu) - GPU3 0000:68:00.0 (gpu) - - 0000:68:00.1 (gpu) - - 0000:68:00.2 (gpu) - - 0000:69:00.0 (nic) - gpu3_eth bus 0000:60:05.4: 0000:6e:00.0 (gpu) - - bus 0000:80:01.1: 0000:85:00.0 (gpu) - GPU4 0000:88:00.0 (gpu) - - 0000:88:00.1 (gpu) - - 0000:88:00.2 (gpu) - - 0000:89:00.0 (nic) - gpu4_eth bus 0000:a0:01.1: 0000:a5:00.0 (gpu) - - 0000:a5:00.1 (gpu) - - 0000:a5:00.2 (gpu) - - 0000:a6:00.0 (nic) - gpu5_eth 0000:a9:00.0 (gpu) - GPU5 bus 0000:c0:01.1: 0000:c5:00.0 (gpu) - - 0000:c5:00.1 (gpu) - - 0000:c5:00.2 (gpu) - - 0000:c6:00.0 (nic) - gpu6_eth 0000:c9:00.0 (gpu) - GPU6 bus 0000:c0:03.1: 0000:d2:00.0 (nic) - mgmt_eth 0000:d2:00.1 (nic) - ens61f1np1 bus 0000:e0:01.1: 0000:e5:00.0 (gpu) - GPU7 0000:e8:00.0 (gpu) - - 0000:e8:00.1 (gpu) - - 0000:e8:00.2 (gpu) - - 0000:e9:00.0 (nic) - gpu7_eth
To further identify the interfaces, you can use thesudo ethtool <device> | grep Speed
-
jnpr@MI300X-01:~/SCRIPTS$ sudo ethtool ens61f0np0| grep Speed Speed: 400000Mb/s jnpr@MI300X-01:~/SCRIPTS$ sudo ethtool enp47s0f0np0| grep Speed Speed: 200000Mb/s jnpr@MI300X-01:~/SCRIPTS$ sudo ethtool enp208s0f0np0| grep Speed Speed: 100000Mb/s
You want to make sure that the NICs connected to the GPU Backend fabric, the Storage Backend fabric, and the Frontend fabric are 400GE interfaces, 200GE interfaces, and 100GE interfaces, respectively.
DEFAULT INTERFACE NAME NEW NAME Speed enp6s0np0 gpu0_eth 400GE enp35s0np0 gpu1_eth 400GE enp67s0np0 gpu2_eth 400GE enp102s0np0 gpu3_eth 400GE enp134s0np0 gpu4_eth 400GE enp163s0np0 gpu5_eth 400GE enp195s0np0 gpu6_eth 400GE enp230s0np0 gpu7_eth 400GE enp47s0f0np0 stor0_eth 200GE enp47s0f0np1 stor1_eth 200GE enp208s0f0np0 mgmt_eth 100GE -
- Find the interface’s MAC address:
You can use the
ip linkshow <device>command.EXAMPLE:
-
jnpr@MI300X-01:~/SCRIPTS$ ip link show ens61f0np0 | grep "link/ether" link/ether 5c:25:73:66:c3:ee brd ff:ff:ff:ff:ff:ff jnpr@MI300X-01:~/SCRIPTS$ ip link show enp35s0np0 | grep "link/ether" link/ether 5c:25:73:66:bc:5e brd ff:ff:ff:ff:ff:ff
DEFAULT INTERFACE NAME NEW NAME MAC address enp6s0np0 gpu0_eth 7c:c2:55:bd:75:d0 enp35s0np0 gpu1_eth 7c:c2:55:bd:79:20 enp67s0np0 gpu2_eth 7c:c2:55:bd:7d:f0 enp102s0np0 gpu3_eth 7c:c2:55:bd:7e:20 enp134s0np0 gpu4_eth 7c:c2:55:bd:75:10 enp163s0np0 gpu5_eth 7c:c2:55:bd:7d:c0 enp195s0np0 gpu6_eth 7c:c2:55:bd:84:90 enp230s0np0 gpu7_eth 7c:c2:55:bd:83:10 enp47s0f0np0 stor0_eth 5c:25:73:66:bc:5e enp47s0f0np1 stor1_eth 5c:25:73:66:bc:5f enp208s0f0np0 mgmt_eth 5c:25:73:66:c3:ee -
- Modify the netplan configuration file using the new name and
MAC addresses determined in the previous steps.
EXAMPLE:
-
network: version: 2 ethernets: gpu0_eth: match: macaddress: 7c:c2:55:bd:75:d0 <= MAC address associated to the original ens61f0np0. Will become gpu0_eth. dhcp4: false mtu: 9000 <= Interface’s MTU (default = 1500) addresses: - 10.200.16.18/24 <= New IP address(s) routes: - to: 10.200.0.0/16 <= New route(s). Example shows route for 10.200.0.0/16 via 10.200.16.254 via: 10.200.16.254 from: 10.200.16.18 set-name: gpu0_eth <= New interface name ---more---
Make sure to keep proper indentation, and hyphens were appropriate (e.g. before IP addresses, routes, etc.) when editing the file. For the IP addresses, make sure to include the subnet mask.
The following is an example of the netplan configuration file for one of the MI300X servers in the lab:
-
jnpr@MI300X-01:/etc/netplan$ cat 00-installer-config.yaml network: version: 2 ethernets: mgmt_eth: match: macaddress: 5c:25:73:66:c3:ee dhcp4: false addresses: - 10.10.1.25/31 nameservers: addresses: - 8.8.8.8 routes: - to: default via: 10.10.1.24 set-name: mgmt_eth stor0_eth: match: macaddress: 5c:25:73:66:bc:5e dhcp4: false mtu: 9000 addresses: - 10.100.5.3/31 routes: - to: 10.100.0.0/21 via: 10.100.5.2 set-name: stor0_eth stor1_eth: match: macaddress: 5c:25:73:66:bc:5f dhcp4: false mtu: 9000 addresses: - 10.100.5.5/31 routes: - to: 10.100.0.0/21 via: 10.100.5.4 set-name: stor1_eth gpu0_eth: match: macaddress: 7c:c2:55:bd:75:d0 dhcp4: false mtu: 9000 addresses: - 10.200.16.18/24 routes: - to: 10.200.0.0/16 via: 10.200.16.254 from: 10.200.16.18 set-name: gpu0_eth gpu1_eth: match: macaddress: 7c:c2:55:bd:79:20 dhcp4: false mtu: 9000 addresses: - 10.200.17.18/24 routes: - to: 10.200.0.0/16 via: 10.200.17.254 from: 10.200.17.18 set-name: gpu1_eth gpu2_eth: match: macaddress: 7c:c2:55:bd:7d:f0 dhcp4: false mtu: 9000 addresses: - 10.200.18.18/24 routes: - to: 10.200.0.0/16 via: 10.200.18.254 from: 10.200.18.18 set-name: gpu2_eth gpu3_eth: match: macaddress: 7c:c2:55:bd:7e:20 dhcp4: false mtu: 9000 addresses: - 10.200.19.18/24 routes: - to: 10.200.0.0/16 via: 10.200.19.254 from: 10.200.19.18 set-name: gpu3_eth gpu4_eth: match: macaddress: 7c:c2:55:bd:75:10 dhcp4: false mtu: 9000 addresses: - 10.200.20.18/24 routes: - to: 10.200.0.0/16 via: 10.200.20.254 from: 10.200.20.18 set-name: gpu4_eth gpu5_eth: match: macaddress: 7c:c2:55:bd:7d:c0 dhcp4: false mtu: 9000 addresses: - 10.200.21.18/24 routes: - to: 10.200.0.0/16 via: 10.200.21.254 from: 10.200.21.18 set-name: gpu5_eth gpu6_eth: match: macaddress: 7c:c2:55:bd:84:90 dhcp4: false mtu: 9000 addresses: - 10.200.22.18/24 routes: - to: 10.200.0.0/16 via: 10.200.22.254 from: 10.200.22.18 set-name: gpu6_eth gpu7_eth: match: macaddress: 7c:c2:55:bd:83:10 dhcp4: false mtu: 9000 addresses: - 10.200.23.18/24 routes: - to: 10.200.0.0/16 via: 10.200.23.254 from: 10.200.23.18 set-name: gpu7_eth
-
-
Save the file and apply the changes using the netplan apply command.
jnpr@MI300X-01:/etc/netplan$ sudo netplan apply
jnpr@MI300X-01:/etc/netplan$
- Verify that the changes were correctly applied.
Check that the new interface names are correct:
Thor2 NIC output:
-
root@MI300X-01:/home/jnpr/SCRIPTS# > devnames; for iface in $(ls /sys/class/net/ | grep -Ev '^(lo|docker|virbr)'); do device=$(ethtool -i $iface 2>/dev/null | grep 'bus-info' | awk '{print $2}'); if [[ $device != 0000:* ]]; then device="0000:$device"; fi; model=$(lspci -s $device 2>/dev/null | awk -F ': ' '{print $2}'); echo "$iface:$model" >> devnames; done root@MI300X-01:/home/jnpr/SCRIPTS# cat devnames ens61f1np1:Mellanox Technologies MT2910 Family [ConnectX-7] enxbe3af2b6059f: gpu0_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu1_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu2_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu3_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu4_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu5_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu6_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu7_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) mgmt_eth:Mellanox Technologies MT2910 Family [ConnectX-7] stor0_eth:Mellanox Technologies MT2910 Family [ConnectX-7] stor1_eth:Mellanox Technologies MT2910 Family [ConnectX-7]
AMD Pollara NIC output for same command:
-
jnpr@mi300-01:~$ > devnames; for iface in $(ls /sys/class/net/ | grep -Ev '^(lo|docker|virbr)'); do device=$(ethtool -i $iface 2>/dev/null | grep 'bus-info' | awk '{print $2}'); if [[ $device != 0000:* ]]; then device="0000:$device"; fi; model=$(lspci -s $device 2>/dev/null | awk -F ': ' '{print $2}'); echo "$iface:$model" >> devnames; done jnpr@mi300-01:~$ cat devnames ens61f1np1:Mellanox Technologies MT2910 Family [ConnectX-7] eth3: gpu0_eth:Pensando Systems DSC Ethernet Controller gpu1_eth:Pensando Systems DSC Ethernet Controller gpu2_eth:Pensando Systems DSC Ethernet Controller gpu3_eth:Pensando Systems DSC Ethernet Controller gpu4_eth:Pensando Systems DSC Ethernet Controller gpu5_eth:Pensando Systems DSC Ethernet Controller gpu6_eth:Pensando Systems DSC Ethernet Controller gpu7_eth:Pensando Systems DSC Ethernet Controller mgmt_eth:Mellanox Technologies MT2910 Family [ConnectX-7] stor0_eth:Mellanox Technologies MT2910 Family [ConnectX-7] stor1_eth:Mellanox Technologies MT2910 Family [ConnectX-7]
Verify that the IP addresses were configured correctly:
-
user@MI300X-03:~/scripts$ ip address show gpu0_eth 4: gpu0_eth: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 9000 qdisc mq state UP group default qlen 1000 link/ether 6c:92:cf:87:cc:00 brd ff:ff:ff:ff:ff:ff inet 10.200.24.22/24 brd 10.200.24.255 scope global gpu0_eth valid_lft forever preferred_lft forever inet6 fe80::6e92:cfff:fe87:cc00/64 scope link valid_lft forever preferred_lft forever
OR
-
jnpr@MI300X-01:/etc/netplan$ ifconfig gpu0_eth gpu0_eth: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 9000 inet 10.200.16.18 netmask 255.255.255.0 broadcast 10.200.16.255 inet6 fe80::7ec2:55ff:febd:75d0 prefixlen 64 scopeid 0x20<link> ether 7c:c2:55:bd:75:d0 txqueuelen 1000 (Ethernet) RX packets 253482 bytes 28518251 (28.5 MB) RX errors 0 dropped 0 overruns 0 frame 0 TX packets 38519 bytes 10662707 (10.6 MB) TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
Check that the routes were added correctly to the routing table:
-
jnpr@MI300X-01:/etc/netplan$ route | grep mgmt_eth default _gateway 0.0.0.0 UG 0 0 0 mgmt_eth 10.10.1.24 0.0.0.0 255.255.255.254 U 0 0 0 mgmt_eth jnpr@MI300X-01:/etc/netplan$ route | grep gpu0_eth 10.200.0.0 10.200.16.254 255.255.0.0 UG 0 0 0 gpu0_eth 10.200.16.0 0.0.0.0 255.255.255.0 U 0 0 0 gpu0_eth
OR
-
user@MI300X-03:~/scripts$ ip route show | grep gpu0_eth 10.200.24.0/24 dev gpu0_eth proto kernel scope link src 10.200.24.22
Check address resolution:
-
jnpr@MI300X-01:/etc/netplan$ ping google.com -c 5 -n PING google.com (142.250.188.14) 56(84) bytes of data. 64 bytes from 142.250.188.14: icmp_seq=1 ttl=113 time=2.16 ms 64 bytes from 142.250.188.14: icmp_seq=2 ttl=113 time=2.43 ms 64 bytes from 142.250.188.14: icmp_seq=3 ttl=113 time=191 ms 64 bytes from 142.250.188.14: icmp_seq=4 ttl=113 time=50.6 ms 64 bytes from 142.250.188.14: icmp_seq=5 ttl=113 time=12.0 ms --- google.com ping statistics --- 5 packets transmitted, 5 received, 0% packet loss, time 4005ms rtt min/avg/max/mdev = 2.158/51.596/190.818/71.851 ms
AMD Pollara firmware and dependent libraries
For brevity, the steps described here only pertain to enabling RCCL test for AMD Pollara 400 NIC and hence all the necessary dependent software and libraries are required to be installed for RCCL test to run. The steps involved pertain to the libraries listed in AMD Server and NIC Firmware and RCCL supporting libraries table.
- Ensure that ubuntu OS version is 22.04 as suggested in section
AMD Server and NIC Firmware and RCCL
supporting libraries
-
Install ROCm library as suggested in below steps. wget https://repo.radeon.com/amdgpu-install/6.3.3/ubuntu/jammy/amdgpu-install_6.3.60303-1_all.deb sudo apt install ./amdgpu-install_6.3.60303-1_all.deb sudo apt update sudo apt install amdgpu-dkms rocm sudo apt install cmake libstdc++-12-dev
-
- Install RCCL library as suggested in the steps below. Note that
the RCCL and ANP are private libraries provided by AMD.
-
tar xf rccl-7961624_may21.tgz cd rccl-7961624 ./install.sh -l --prefix=build --disable-mscclpp --disable-msccl-kernel
-
- Install Unified Communication Framework (UCX). The Unified
Communication Framework (UCX) is an open source, cross-platform
framework designed to provide a common set of communication
interfaces for various network programming models and interfaces,
refer AMD
documentation for more information.
-
sudo apt install libtool git clone https://github.com/openucx/ucx.git cd ucx ./autogen.sh mkdir build cd build ../configure --prefix=/opt/ucx --with-rocm=/opt/rocm ../configure --prefix=/opt/ucx make -j $(nproc) sudo make -j $(nproc) install
-
- Next, Install OpenMPI. Note that the OpenMPI is a GitHub link,
and hence GitHub credentials may be required. The Open MPI Project
is an open source Message Passing
Interface implementation that is developed and maintained by a
consortium of academic, research, and industry partners. Open MPI
is therefore able to combine the expertise, technologies, and
resources from across the High
Performance Computing community in order to build the best MPI
library available, refer OpenMPI for more information.
-
sudo apt install flex git clone --recursive https://github.com/open-mpi/ompi.git cd ompi ./autogen.pl mkdir build cd build ../configure --prefix=/opt/ompi --with-ucx=/opt/ucx --with-rocm=/opt/rocm make -j $(nproc) sudo make install
-
- Install Pollara drivers and firmware. This is an AMD provided
firmware bundle. This firmware will also install the
‘nicctl’ command line utility to interact with the
Pollara NICs and run commands to reset cards or configure QOS etc.
-
# Prerequisites sudo apt install device-tree-compiler policycoreutils ninja-build jq pkg-config libnl-3-dev libnl-route-3-dev libpci-dev # Untar the bundle itself tar xf ainic_bundle_1.113.0-a-2.tar.gz # cd into the bundle directory cd ainic_bundle_1.113.0-a-2 # untar the host software tar xf host_sw_pkg.tar.gz # cd into the host software directory cd host_sw_pkg # install the drivers and software sudo ./install.sh
Output of the Firmware version:
-
jnpr@MI300-01:~/ainic_bundle_1.110.0-a-79$ sudo nicctl update firmware --image ./ainic_fw_salina.tar --log-file /tmp/amd_ainic_upgrade.log ---------------------------------------------------------------------------------- Card Id Stage Progress ---------------------------------------------------------------------------------- 42424650-4c32-3530-3130-313346000000 Done 100% [02:50.941] 42424650-4c32-3530-3130-313844000000 Done 100% [02:41.200] 42424650-4c32-3530-3130-313242000000 Done 100% [02:51.584] 42424650-4c32-3530-3130-304341000000 Done 100% [02:51.281] 42424650-4c32-3530-3130-313434000000 Done 100% [02:31.062] 42424650-4c32-3530-3130-314537000000 Done 100% [02:51.480] 42424650-4c32-3530-3130-314436000000 Done 100% [02:51.077] 42424650-4c32-3530-3130-304435000000 Done 100% [02:51.367] NIC 42424650-4c32-3530-3130-313346000000 (0000:06:00.0) : Successful NIC 42424650-4c32-3530-3130-313844000000 (0000:23:00.0) : Successful NIC 42424650-4c32-3530-3130-313242000000 (0000:43:00.0) : Successful NIC 42424650-4c32-3530-3130-304341000000 (0000:66:00.0) : Successful NIC 42424650-4c32-3530-3130-313434000000 (0000:86:00.0) : Successful NIC 42424650-4c32-3530-3130-314537000000 (0000:a3:00.0) : Successful NIC 42424650-4c32-3530-3130-314436000000 (0000:c3:00.0) : Successful NIC 42424650-4c32-3530-3130-304435000000 (0000:e6:00.0) : Successful
-
- Once the firmware install is complete, run the reset card to
reflect the firmware version.
Pollara NIC output of Firmware update
-
jnpr@mi300-01:~$ sudo nicctl reset card --all NIC 42424650-4c32-3530-3130-313346000000 (0000:06:00.0) : Card reset triggered, wait for completion (75 secs) NIC 42424650-4c32-3530-3130-313844000000 (0000:23:00.0) : Card reset triggered, wait for completion (75 secs) NIC 42424650-4c32-3530-3130-313242000000 (0000:43:00.0) : Card reset triggered, wait for completion (75 secs) NIC 42424650-4c32-3530-3130-304341000000 (0000:66:00.0) : Card reset triggered, wait for completion (75 secs) NIC 42424650-4c32-3530-3130-313434000000 (0000:86:00.0) : Card reset triggered, wait for completion (75 secs) NIC 42424650-4c32-3530-3130-314537000000 (0000:a3:00.0) : Card reset triggered, wait for completion (75 secs) NIC 42424650-4c32-3530-3130-314436000000 (0000:c3:00.0) : Card reset triggered, wait for completion (75 secs) NIC 42424650-4c32-3530-3130-304435000000 (0000:e6:00.0) : Card reset triggered, wait for completion (75 secs) NIC 42424650-4c32-3530-3130-313346000000 (0000:06:00.0) : Card reset successful NIC 42424650-4c32-3530-3130-313844000000 (0000:23:00.0) : Card reset successful NIC 42424650-4c32-3530-3130-313242000000 (0000:43:00.0) : Card reset successful NIC 42424650-4c32-3530-3130-304341000000 (0000:66:00.0) : Card reset successful NIC 42424650-4c32-3530-3130-313434000000 (0000:86:00.0) : Card reset successful NIC 42424650-4c32-3530-3130-314537000000 (0000:a3:00.0) : Card reset successful NIC 42424650-4c32-3530-3130-314436000000 (0000:c3:00.0) : Card reset successful NIC 42424650-4c32-3530-3130-304435000000 (0000:e6:00.0) : Card reset successful jnpr@mi300-01:~$ sudo nicctl show card --detail | grep Firm Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79 Firmware version : 1.110.0-a-79
-
- Install ANP plugin. ANP is a plugin
library designed to enhance the RCCL collective communication
library with extended network transport support. The ANP Plugin
library is a private AMD library.
-
sudo apt install libboost-dev export RCCL_BUILD=/home/${User}/pollara/rccl-7961624/build/release export MPI_INCLUDE=/opt/ompi/include export MPI_LIB_PATH=/opt/ompi/lib make RCCL_BUILD=$RCCL_BUILD MPI_INCLUDE=$MPI_INCLUDE MPI_LIB_PATH=$MPI_LIB_PATH
-
- Lastly Build the RCCL tests.
Build rccl-tests git clone https://github.com/ROCm/rccl-tests.git cd rccl-tests make MPI=1 MPI_HOME=/opt/ompi NCCL_HOME=/home/${User}/pollara/rccl-7961624/build/release CUSTOM_RCCL_LIB=/home/${User}/pollara/rccl-7961624/build/release/librccl.so -j $(nproc) make MPI=1 MPI_HOME=/opt/ompi NCCL_HOME=/home/dbarmann/pollara/rccl-7961624/build/release HIP_HOME=/home/${User}/pollara/rccl-7961624/build/release CUSTOM_RCCL_LIB=/home/${User}/pollara/rccl-7961624/build/release/librccl.so -j $(nproc)
Broadcom BCM957608 Thor2 DCQCN configuration for RDMA Traffic
Default DCQN-ECN/PFC attributes in AMD servers.
The network interface adapters are configured with the following Class of Service (including DCQCN-ECN) parameters for RoCE traffic:
For Thor2 NIC adapter:
- RoCEv2 (RDMA over IPv4) enabled
- Congestion Control (ECN) and PFC enabled
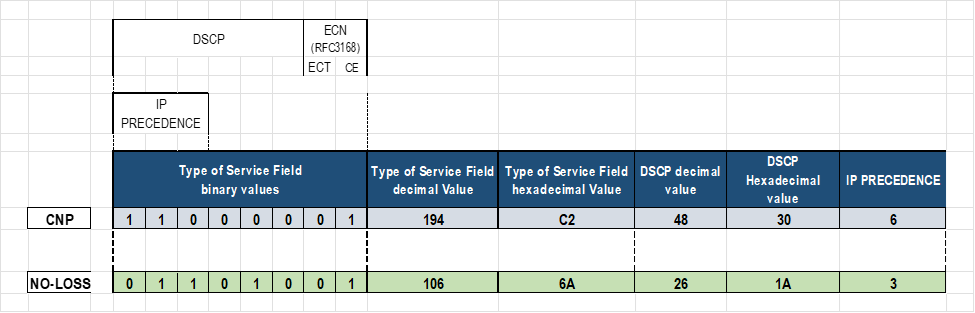
- RoCE traffic tagged with DSCP 26 on PRIORITY 3
- RoCE CNP traffic tagged with DSCP 48 and PRIORITY 7
Mapping Broadcom and logical interface names to configure DCQN-ECN/PFC and TOS/DSCP for RDMA Traffic attributes in AMD servers
DCQCN ECN, PFC and traffic marking need to be configured on the interfaces connected to the GPU backend; that is on the gpu#_eth (#=0-7) interfaces only.
In the Changing NIC attributes section of this document, we determined that the gpu#_eth interfaces in our servers, are Broadcom BCM957608 (shown below) NICs.
-
root@MI300X-01:/home/jnpr/SCRIPTS# cat devnames | grep gpu gpu0_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu1_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu2_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu3_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu4_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu5_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu6_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11) gpu7_eth:Broadcom Inc. and subsidiaries BCM957608 25Gb/50Gb/100Gb/200Gb/400Gb Ethernet (rev 11)
All the steps for configuring Class of Service in this section will be focused on these Broadcom interfaces.
We will be using a combination of Linux system commands and Broadcom tools to enable, tune and monitor DCQCN ECN/PFC operation and RoCE traffic marking. For some of these commands we will need to find the Broadcom interface name associated with each gpu interface. Follow these steps to find these mappings:
- Find the PCI address of each gpu#_eth interface using the
following logic:
-
for iface in $(ls /sys/class/net | grep -E 'gpu[0-9]+_eth'); do pci_addr=$(readlink -f /sys/class/net/$iface/device | awk -F '/' '{print $NF}') echo "$iface => $pci_addr" done1
EXAMPLE:
-
root@MI300X-01:/home/jnpr/SCRIPTS# for iface in $(ls /sys/class/net | grep -E 'gpu[0-9]+_eth'); do pci_addr=$(readlink -f /sys/class/net/$iface/device | awk -F '/' '{print $NF}') echo "$iface => $pci_addr" done gpu0_eth => 0000:06:00.0 gpu1_eth => 0000:23:00.0 gpu2_eth => 0000:43:00.0 gpu3_eth => 0000:66:00.0 gpu4_eth => 0000:86:00.0 gpu5_eth => 0000:a3:00.0 gpu6_eth => 0000:c3:00.0 gpu7_eth => 0000:e6:00.0
-
- Find the bnxt_re# (#=0-7) devices that corresponds to each PCI
address using the following logic:
-
for pci in $(find /sys/class/infiniband -type l -exec basename {} \;); do pci_addr=$(readlink -f /sys/class/infiniband/$pci/device | awk -F '/' '{print $NF}') echo "$pci => $pci_addr" |grep bnxt done
EXAMPLE:
-
root@MI300X-01:/home/jnpr/SCRIPTS# for pci in $(find /sys/class/infiniband -type l -exec basename {} \;); do pci_addr=$(readlink -f /sys/class/infiniband/$pci/device | awk -F '/' '{print $NF}') echo "$pci => $pci_addr" |grep bnxt done bnxt_re5 => 0000:a3:00.0 bnxt_re3 => 0000:66:00.0 bnxt_re1 => 0000:23:00.0 bnxt_re6 => 0000:c3:00.0 bnxt_re4 => 0000:86:00.0 bnxt_re2 => 0000:43:00.0 bnxt_re0 => 0000:06:00.0 bnxt_re7 => 0000:e6:00.0
-
- MAP the GPU interface bnxt_re# or mlx5_# interface names.
Combine the outputs from steps 1 and 2 to create a full mapping from gpu#_eth to bnxt_re# or mlx5_#. You can see from the outputs that for example gpu0_eth corresponds to bnxt_re3 (0000:66:00.0)
You can use the following logic to simplify the process:
-
echo "GPU-to-NIC Mapping:" for iface in $(ls /sys/class/net | grep -E 'gpu[0-9]+_eth'); do pci_addr=$(readlink -f /sys/class/net/$iface/device | awk -F '/' '{print $NF}') rdma_dev=$(find /sys/class/infiniband -type l -exec basename {} \; | while read rdma; do rdma_pci=$(readlink -f /sys/class/infiniband/$rdma/device | awk -F '/' '{print $NF}') if [[ "$pci_addr" == "$rdma_pci" ]]; then echo "$rdma"; fi done) echo "$iface => $pci_addr => $rdma_dev" done
EXAMPLE:
-
root@MI300X-01:/home/jnpr/SCRIPTS# echo "GPU-to-NIC Mapping:" for iface in $(ls /sys/class/net | grep -E 'gpu[0-9]+_eth'); do pci_addr=$(readlink -f /sys/class/net/$iface/device | awk -F '/' '{print $NF}') rdma_dev=$(find /sys/class/infiniband -type l -exec basename {} \; | while read rdma; do rdma_pci=$(readlink -f /sys/class/infiniband/$rdma/device | awk -F '/' '{print $NF}') if [[ "$pci_addr" == "$rdma_pci" ]]; then echo "$rdma"; fi done) echo "$iface => $pci_addr => $rdma_dev" done GPU-to-NIC Mapping: gpu0_eth => 0000:06:00.0 => bnxt_re0 gpu1_eth => 0000:23:00.0 => bnxt_re1 gpu2_eth => 0000:43:00.0 => bnxt_re2 gpu3_eth => 0000:66:00.0 => bnxt_re3 gpu4_eth => 0000:86:00.0 => bnxt_re4 gpu5_eth => 0000:a3:00.0 => bnxt_re5 gpu6_eth => 0000:c3:00.0 => bnxt_re6 gpu7_eth => 0000:e6:00.0 => bnxt_re7
Configuring DCQN-ECN/PFC and TOS/DSCP for RDMA Traffic attributes in AMD servers (Broadcom interfaces)
Some of the parameters related to DCQN-ECN/PFC and TOS/DSCP are listed in the following table:
Table 25. Server DCQCN configuration parameters
| PARAMETER | DESCRIPTION | DEFAULT |
|---|---|---|
| cc_mode | 1 | |
| cnp_ecn | Enables/disables ECN | 0x1 (enabled) |
| cnp_dscp | DSCP value for RoCE congestion notification packets | 48 |
| cnp_prio | Priority for RoCE congestion notification packets | 7 |
| cnp_ratio_th | Defines the threshold ratio for generating CNPs. It determines the rate CNPs are sent in response to congestion, helping control the feedback mechanism's aggressiveness. | 0x0 |
| ecn_enable | Enable congestion control. | 0x1 (enabled) |
| ecn_marking | Enables tagging of packets as ECN-enabled. ECN = 01 | 0x1 (enabled) |
| default_roce_mode | Sets the default RoCE mode for RDMA | RoCE v2 |
| default_roce_tos | Sets the default ToS value for RDMA traffic | 104 |
| roce_dscp | DSCP value for RoCE packets. | 26 |
| roce_prio | Priority for RoCE packets. | 3 |
| rtt | Time period (µs) over which cnp and transmitted packets counts accumulate. At the end of rtt, the ratio between CNPs and TxPkts is computed, and the CP is updated. | 40 μs. |
BCM95741X Ethernet network adapters support three transmit and receive queues for each Ethernet port: 0, 4, and 5.
BCM95750X Ethernet network adapters support eight transmit and receive queues for each Ethernet port: 0 through 7.
By default, all queues are configured for weighted-fair-queueing (WFQ), with priority 0 traffic mapped to queue 4.
When the RoCE bnxt_re driver is loaded, CoSQ 0 is configured for lossless traffic, and CoSQ 5 is changed from WFQ to strict priority (SP) for CNP processing.
RoCE and CNP traffic can be tagged with different DSCP values or use VLAN tags instead.
By default, the ToS field is set to 104, which means DSCP is set to 48, and the ECN bits are set to 10 (ECN-enabled).
These parameters can be adjusted using three different methods:
- Configuring DCQCN/RDMA marking values directly
- Configuring DCQCN/RDMA marking values using Broadcom tools such
as
niccli,orlldptooldirectly - Configuring DCQCN/RDMA marking values using
thebnxt_setupcc.shutility, which uses eitherniccliorlldptool(default) behind the scenes.
The following sections describe the steps to make changes using these different options.
-
set class-of-service classifiers dscp mydscp forwarding-class CNP loss-priority low code-points 110000 set class-of-service classifiers dscp mydscp forwarding-class NO-LOSS loss-priority low code-points 011010 set class-of-service forwarding-classes class NO-LOSS pfc-priority 3
Configuring DCQN-ECN/PFC and TOS/DSCP for RDMA Traffic attributes directly
You can make changes to the DCQCN and traffic marking by directly editing the files that contain the values of each parameter. This method is the easiest and does not require installation of any additional tools. However, it is not an option for PFC related parameters, nor is it supported on all types of network adapters.
To complete these changes for a specific interface, you must be under in the proper interface directory, following these steps:
- Create interface directories for qos related values
We determined the mappings between the gpu#_eth interfaces and the corresponding Broadcom interface names
GPU-to-NIC Mapping:
gpu0_eth => 0000:06:00.0 => bnxt_re0
gpu1_eth => 0000:23:00.0 => bnxt_re1
gpu2_eth => 0000:43:00.0 => bnxt_re2
gpu3_eth => 0000:66:00.0 => bnxt_re3
gpu4_eth => 0000:86:00.0 => bnxt_re4
gpu5_eth => 0000:a3:00.0 => bnxt_re5
gpu6_eth => 0000:c3:00.0 => bnxt_re6
gpu7_eth => 0000:e6:00.0 => bnxt_re7
We will use the Broadcom interface names to create the directories (rdma_cm and bnxt_re) where the DCQCN attributes as well as other parameters and statistics will be located for each interface.
The interface specific directories do not exist until created using the following commands:
-
cd /sys/kernel/config mkdir -p /rdma_cm/<Broadcom-interface-name> mkdir -p /bnxt_re/<Broadcom-interface-name>
Notice that these two directories must be present.
-
root@MI300X-01:/# cd /sys/kernel/config/ls bnxt_re rdma_cm
If the rdma_cm directory for example is missing, try the following:
-
root@MI300X-01:/sys/kernel/config# sudo modprobe rdma_cm root@MI300X-01:/sys/kernel/config# lsmod | grep rdma_cm rdma_cm 147456 0 iw_cm 61440 1 rdma_cm ib_cm 151552 1 rdma_cm ib_core 507904 6 rdma_cm,iw_cm,bnxt_re,ib_uverbs,mlx5_ib,ib_cm
EXAMPLE:
-
root@MI300X-01:/# cd /sys/kernel/config/bnxt_re root@MI300X-01:/sys/kernel/config/bnxt_re# (NO FILES LISTED) root@MI300X-01:/# cd /sys/kernel/config/rdma_cm root@MI300X-01:/sys/kernel/config/rdma_cm# ls (NO FILES LISTED) root@MI300X-01:/sys/kernel/config# mkdir -p rdma_cm/bnxt_re0 root@MI300X-01:/sys/kernel/config# mkdir -p bnxt_re/bnxt_re0 root@MI300X-01:/sys/kernel/config# ls rdma_cm bnxt_re0 root@MI300X-01:/sys/kernel/config# ls bnxt_re bnxt_re0 root@MI300X-01:/sys/kernel/config# mkdir -p rdma_cm/bnxt_re1 root@MI300X-01:/sys/kernel/config# mkdir -p bnxt_re/bnxt_re1 root@MI300X-01:/sys/kernel/config# ls rdma_cm bnxt_re0 bnxt_re1 root@MI300X-01:/sys/kernel/config# ls bnxt_re bnxt_re0 bnxt_re1
Repeat these steps for all the gpu interfaces.
NOTE: You must be a root user to make these changes.-
jnpr@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc$ sudo echo -n 0x1 > ecn_enable -bash: ecn_enable: Permission denied. jnpr@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc$ sudo bash root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# sudo echo -n 0x1 > ecn_enable root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc#
The new directories will contain values pertaining to ECN, ROCE traffic, and other functions:
-
root@MI300X-01:/sys/kernel/config# cd rdma_cm/bnxt_re0/ports/1 root@MI300X-01:/sys/kernel/config/rdma_cm/bnxt_re0/ports/1# ls default_roce_mode default_roce_tos root@MI300X-01:/sys/kernel/config/rdma_cm/bnxt_re0/ports/1# cd /sys/kernel/config/bnxt_re/bnxt_re0/ports/1 root@MI300X-02:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1$ ls cc tunables root@MI300X-02:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1$ ls tunables acc_tx_path cq_coal_en_ring_idle_mode dbr_pacing_algo_threshold en_qp_dbg snapdump_dbg_lvl user_dbr_drop_recov_timeout cq_coal_buf_maxtime cq_coal_normal_maxbuf dbr_pacing_enable gsi_qp_mode stats_query_sec cq_coal_during_maxbuf dbr_def_do_pacing dbr_pacing_time min_tx_depth user_dbr_drop_recov root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/# ls cc abs_max_quota act_cr_factor act_rel_cr_th actual_cr_shift_correction_en advanced ai_rate_incr ai_rtt_th1 ai_rtt_th2 apply bw_avg_weight cc_ack_bytes cc_mode cf_rtt_th cnp_dscp cnp_ecn cnp_prio cnp_ratio_th cp_bias cp_bias_en cp_exp_update_th cr_min_th cr_prob_fac cr_width disable_prio_vlan_tx ecn_enable ecn_marking exp_ai_rtts exp_crcp_ratio fair_cr_th fr_num_rtts g inact_th init_cp init_cr init_tr l64B_per_rtt lbytes_per_usec max_cp_cr_th max_quota min_quota min_time_bet_cnp random_no_red_en red_div red_rel_rtts_th reduce_cf_rtt_th reset_cc_cr_th roce_dscp roce_prio rt_en rtt rtt_jitter_en sc_cr_th1 sc_cr_th2 tr_lb tr_prob_fac tr_update_cyls tr_update_mode
You can find a description of some of these parameters, as well as their current value using
cat to applywithin the/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc#directory.EXAMPLE:
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat apply ecn status (ecn_enable) : Enabled ecn marking (ecn_marking) : ECT(1) congestion control mode (cc_mode) : DCQCN-P send priority vlan (VLAN 0) : Disabled running avg. weight(g) : 8 inactivity threshold (inact_th) : 10000 usec initial current rate (init_cr) : 0xc8 initial target rate (init_tr) : 0x320 cnp header ecn status (cnp_ecn) : ECT(1) rtt jitter (rtt_jitter_en) : Enabled link bytes per usec (lbytes_per_usec) : 0x7fff byte/usec current rate width (cr_width) : 0xe bits minimum quota period (min_quota) : 0x4 maximum quota period (max_quota) : 0x7 absolute maximum quota period(abs_max_quota) : 0xff 64B transmitted in one rtt (l64B_per_rtt) : 0xf460 roce prio (roce_prio) : 3 roce dscp (roce_dscp) : 26 cnp prio (cnp_prio) : 7 cnp dscp (cnp_dscp) : 48
-
- Enable RoCEv2 operation.
Even though RoCEv2 should be the default mode, the command to enable RoCEv2 is shown here.
NOTE: This change is made under the rdma_cm directory-
root@MI300X-01:/# cd /sys/kernel/config/rdma_cm/bnxt_re0/ports/1 root@MI300X-01:/sys/kernel/config/rdma_cm/bnxt_re0/ports/1# ls default_roce_mode default_roce_tos root@MI300X-01:/sys/kernel/config/rdma_cm/bnxt_re0/ports/1# echo RoCE v2 > default_roce_mode
NOTE: Enter the value exactly as shown, including the space: “RoCE v2” (case sensitive).After setting the parameter, apply the new values as follows:
-
echo -n 0x1 > apply
Verify the changes:
-
root@MI300X-01:/sys/kernel/config/rdma_cm/bnxt_re1/ports/1# cat default_roce_mode RoCE v2
-
-
Enable ECN response and notification functions.
Even though ECN should be enabled by default, the command to enable ECN is shown here.root@MI300X-01:/# cd /sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# echo -n 0x1 > ecn_enable
echo -n 0x0 > ecn_enable
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# echo -n 0x1 > ecn_enable
When ECN is enabled on the Broadcom interfaces, they will respond to CNP packets (RP) and will generate CNP packets when ECN-marked are received (NP).
To disable it, enter echo -n 0x0 > cnp_ecn
instead.
After setting the parameter, apply the new values:
-
echo -n 0x1 > apply
Verify the changes:
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat ecn_enable 0x1
You can also enable the marking of both CNP and ROCE packets as ECN-eligible (meaning; these packets can be marked across the network when congestion occurs).
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat cnp_ecn 0x1
To summarize these attributes:
| ecn_enable | Enables/Disables the RP (response point) side of ECN. It enables the device to respond to CNP packets. Default = 1 (enable) |
| cnp_ecn | Configures marking CNP packets as ECN-eligible. Either a value of 01 or 10 for ECT field. |
| ecn_marking | Configures marking ROCE packets as ECN-eligible. Either a value of 01 or 10 for ECT field. |
- Configure the DSCP and PRIO values
for CNP and RoCEv2 packets.
NOTE: Configuring these values manually, as shown below, is not an option for all types of Broadcom interface cards. For example, for BCM95741X devices you can use this method to configure the ECN, and RoCE priority values but on the BCM95750X/BCM957608 devices you can configure
roce_dscp, ecn_dscp
See Broadcom Ethernet Network Adapter Congestion Control Parameters
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# echo -n 0x30 > cnp_dscp # DSCP value as 48 (30 in HEX)
NOTE: These changes are made under the bnxt_re0 directory.-
echo -n 0x1a > roce_dscp # DSCP value as 26 (1a in HEX) echo -n 0x7 > cnp_prio echo -n 0x3 > roce_prio
NOTE: The following error indicates that changing the value of this parameter directly is not supported. In the case of BCM957608 roce_prio, and cnp_prio need to be configured usingbnxt_setupcc.sh(described later).-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# echo -n 0x3 > roce_prio bash: echo: write error: Invalid argument
After setting the parameter, apply the new values:
-
echo -n 0x1 > apply
Verify the changes:
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat cnp_dscp 0x30 root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat cnp_dscp 0x1a root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat cnp_prio 0x7 root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat cnp_prio 0x3
-
- Configure the DCQCN algorithm (under the bnxt_re directory).
The default DCQCN Congestion Control (cc-mode) algorithm in Broadcom Ethernet network adapter is DCQCN-P. The mode can be changed using these commands:
NOTE: This change is made under the bnxt_re0 directory.To use DCQCN-P configure:
-
cd /sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc/ echo -n 1 > cc_mode echo -n 1 > apply cat apply
To use DCQCN-D configure:
-
root@MI300X-01:/ cd /sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc/ echo -n 0 > cc_mode echo -n 1 > apply
-
- Check all the attributes that were configured.
The following command shows all the interface parameters:
-
root@MI300X-01:/ cd /sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc/ echo -n 1 > advanced echo -n 1 > apply cat apply
For more information on the DCQCN algorithm in Broadcom Ethernet network adapter check the following documents: Changing Congestion Control Mode Settings and RoCE Congestion Control
EXAMPLE:
We have highlighted some ECN/CNP related parameters:
-
root@MI300X-01:/sys/kernel/config# cd /sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc/ echo -n 1 > advanced echo -n 1 > apply cat apply ecn status (cnp_ecn) : Enabled ecn marking (ecn_marking) : ECT(1) congestion control mode (cc_mode) : DCQCN-P send priority vlan (VLAN 0) : Disabled running avg. weight(g) : 8 inactivity threshold (inact_th) : 10000 usec initial current rate (init_cr) : 0xc8 initial target rate (init_tr) : 0x320 round trip time (rtt) : 45 usec cnp header ecn status (cnp_ecn) : ECT(1) rtt jitter (rtt_jitter_en) : Enabled link bytes per usec (lbytes_per_usec) : 0x7fff byte/usec current rate width (cr_width) : 0xe bits minimum quota period (min_quota) : 0x4 maximum quota period (max_quota) : 0x7 absolute maximum quota period(abs_max_quota) : 0xff 64B transmitted in one rtt (l64B_per_rtt) : 0xf460 minimum time between cnps (min_time_bet_cnp) : 0x0 usec initial congestion probability (init_cp) : 0x3ff target rate update mode (tr_update_mode) : 1 target rate update cycle (tr_update_cyls) : 0x0 fast recovery rtt (fr_num_rtts) : 0x5 rtts active increase time quanta (ai_rate_incr) : 0x1 reduc. relax rtt threshold (red_rel_rtts_th) : 0x2 rtts additional relax cr rtt (act_rel_cr_th) : 0x50 rtts minimum current rate threshold (cr_min_th) : 0x0 bandwidth weight (bw_avg_weight) : 0x5 actual current rate factor (act_cr_factor) : 0x0 current rate level to max cp (max_cp_cr_th) : 0x3ff cp bias state (cp_bias_en) : Disabled log of cr fraction added to cp (cp_bias) : 0x3 cr threshold to reset cc (reset_cc_cr_th) : 0x32a target rate lower bound (tr_lb) : 0x1 current rate probability factor (cr_prob_fac) : 0x3 target rate probability factor (tr_prob_fac) : 0x5 current rate fairness threshold (fair_cr_th) : 0x64 reduction divider (red_div) : 0x1 rate reduction threshold (cnp_ratio_th) : 0x0 cnps extended no congestion rtts (exp_ai_rtts) : 0x8 rtt log of cp to cr ratio (exp_crcp_ratio) : 0x7 use lower rate table entries (rt_en) : Disabled rtts to start cp track cr (cp_exp_update_th) : 0x1a4 rtt first threshold to rise ai (ai_rtt_th1) : 0x40 rtt second threshold to rise ai (ai_rtt_th2) : 0x80 rtt actual rate base reduction threshold (cf_rtt_th) : 0x15e rtt first severe cong. cr threshold (sc_cr_th1) : 0x0 second severe cong. cr threshold (sc_cr_th2) : 0x0 cc ack bytes (cc_ack_bytes) : 0x44 reduce to init rtts threshold(reduce_cf_rtt_th) : 0x3eb rtt random no reduction of cr (random_no_red_en) : Enabled actual cr shift correction (actual_cr_shift_correction_en) : Enabled roce prio (roce_prio) : 3 roce dscp (roce_dscp) : 26 cnp prio (cnp_prio) : 7 cnp dscp (cnp_dscp) : 0
Configuring DCQN-ECN/PFC and TOS/DSCP for RDMA Traffic attributes using niccli
You can make changes to the DCQCN and traffic marking using the NICCLI Configuration Utility.
niccli is a management tool for Broadcom Ethernet
network adapters that provides detailed information, including
type, status, serial number, and firmware version. It also enables
the configuration of interface attributes such as DCQCN-ECN, PFC,
and TOS/DSCP for optimizing RDMA traffic.
Installing the NICCLI Configuration Utility
-
root@MI300X-01:/$ which niccli /usr/bin/niccli root@MI300X-01:/usr/bin$ ls niccli -l lrwxrwxrwx 1 18896 1381 18 Sep 25 18:52 niccli -> /opt/niccli/niccli
You can obtain a summary of the interface adapters and ethernet
ports that can be managed with niccli present on the server using
niccli listdev, or list-eth as shown in the example
below.
-
root@MI300X-01:/home/jnpr# niccli --listdev 1 ) Supermicro PCIe 400Gb Single port QSFP56-DD Ethernet Controller (Adp#1 Port#1) Device Interface Name : gpu0_eth MAC Address : 7C:C2:55:BD:75:D0 PCI Address : 0000:06:00.0 2 ) Supermicro PCIe 400Gb Single port QSFP56-DD Ethernet Controller (Adp#2 Port#1) Device Interface Name : gpu1_eth MAC Address : 7C:C2:55:BD:79:20 PCI Address : 0000:23:00.0 3 ) Supermicro PCIe 400Gb Single port QSFP56-DD Ethernet Controller (Adp#3 Port#1) Device Interface Name : gpu2_eth MAC Address : 7C:C2:55:BD:7D:F0 PCI Address : 0000:43:00.0 4 ) Supermicro PCIe 400Gb Single port QSFP56-DD Ethernet Controller (Adp#4 Port#1) Device Interface Name : gpu3_eth MAC Address : 7C:C2:55:BD:7E:20 PCI Address : 0000:66:00.0 5 ) Supermicro PCIe 400Gb Single port QSFP56-DD Ethernet Controller (Adp#5 Port#1) Device Interface Name : gpu4_eth MAC Address : 7C:C2:55:BD:75:10 PCI Address : 0000:86:00.0 6 ) Supermicro PCIe 400Gb Single port QSFP56-DD Ethernet Controller (Adp#6 Port#1) Device Interface Name : gpu5_eth MAC Address : 7C:C2:55:BD:7D:C0 PCI Address : 0000:A3:00.0 7 ) Supermicro PCIe 400Gb Single port QSFP56-DD Ethernet Controller (Adp#7 Port#1) Device Interface Name : gpu6_eth MAC Address : 7C:C2:55:BD:84:90 PCI Address : 0000:C3:00.0 8 ) Supermicro PCIe 400Gb Single port QSFP56-DD Ethernet Controller (Adp#8 Port#1) Device Interface Name : gpu7_eth MAC Address : 7C:C2:55:BD:83:10 PCI Address : 0000:E6:00.0 root@MI300X-01:/home/jnpr# niccli --list-eth BoardId Interface PCIAddr 1) BCM957608 gpu0_eth 0000:06:00.0 2) BCM957608 gpu1_eth 0000:23:00.0 3) BCM957608 gpu2_eth 0000:43:00.0 4) BCM957608 gpu3_eth 0000:66:00.0 5) BCM957608 gpu4_eth 0000:86:00.0 6) BCM957608 gpu5_eth 0000:A3:00.0 7) BCM957608 gpu6_eth 0000:C3:00.0 8) BCM957608 gpu7_eth 0000:E6:00.0
You can use niccli in either oneline
mode, interactive mode, or batch
mode. The niccli -h help provides a
high-level description of these modes. In this section, we will
show some examples of how to use the oneline and
interactive modes for DCQCN-ECN, PFC, and TOS/DSCP
configuration.
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# niccli --help ------------------------------------------------------------------------------- NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------- NIC CLI - Help Option --help / -h Displays the following help page. Utility provides three modes of execution, 1. Interactive Mode To launch in interactive mode : <NIC CLI executable> [-i <index of the target>] | -pci <NIC pci address> After launching in interactive mode, execute 'help' command to display the list of available commands. 2. Oneline Mode To launch in Oneline mode : <NIC CLI executable> [-i <index of the target>] | -pci <NIC pci address> <command> To list available commands in Oneline mode : <NIC CLI executable> [-i <index of the target>] | -pci <NIC pci address> help Legacy Nic command syntax : To launch in Oneline mode : <NIC CLI executable> [-dev [<index of the target> | <mac addr> | <NIC pci address>]] <command> To list available commands in Oneline mode : <NIC CLI executable> [-dev [<index of the target> | <mac addr> | <NIC pci address>]] help 3. Batch Mode To launch in batch mode : <NIC CLI executable> [-i <index of the target>] | -pci <NIC pci address> --batch <batch file> NOTE: Batch mode requires flat text file with utility supported commands. Commands have to be provided in ascii format with the valid parameters. Supported commands can be listed using One-Line mode or Interactive mode Upon failure of any commands, utility will exit without continuing with other commands List available targets for Oneline or Batch mode <NIC CLI executable> --list <NIC CLI executable> --listdev
Entering
niccli with no options allows you to work in the
interactive mode, where you select an adapter/interface (by index)
and then the proper <command> (e.g., show,
get_qos, set_map) to obtain information or make changes to the
selected interface.
You can identify the interface index corresponding to each
interface using the method described in the Mapping Broadcom interface
name with logical interface name section. This will give you
the mappings between interfaces and pcie address which you can then
correlate with the output of niccli below.
Once identified, enter the interface index (first column in the output) as shown in the example below.
EXAMPLE:
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# niccli ------------------------------------------------------------------------------- NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------ BoardId MAC Address FwVersion PCIAddr Type Mode 1) BCM957608 7C:C2:55:BD:75:D0 230.2.49.0 0000:06:00.0 NIC PCI 2) BCM957608 7C:C2:55:BD:79:20 230.2.49.0 0000:23:00.0 NIC PCI 3) BCM957608 7C:C2:55:BD:7D:F0 230.2.49.0 0000:43:00.0 NIC PCI 4) BCM957608 7C:C2:55:BD:7E:20 230.2.49.0 0000:66:00.0 NIC PCI 5) BCM957608 7C:C2:55:BD:75:10 230.2.49.0 0000:86:00.0 NIC PCI 6) BCM957608 7C:C2:55:BD:7D:C0 230.2.49.0 0000:A3:00.0 NIC PCI 7) BCM957608 7C:C2:55:BD:84:90 230.2.49.0 0000:C3:00.0 NIC PCI 8) BCM957608 7C:C2:55:BD:83:10 230.2.49.0 0000:E6:00.0 NIC PCI Enter the target index to connect with : 1 BCM957608> Once you are at the prompt for the selected NIC, you can enter commands such asshow, device_health_check, listdev,andlisteth) BCM957608> show NIC State : Up Device Type : THOR2 PCI Vendor ID : 0x14E4 PCI Device ID : 0x1760 PCI Revision ID : 0x11 PCI Subsys Vendor ID : 0x15D9 PCI Subsys Device ID : 0x1D42 Device Interface Name : gpu0_eth MAC Address : 7C:C2:55:BD:75:D0 Base MAC Address : 7C:C2:55:BD:75:D0 Serial Number : OA248S074777 Part Number : AOC-S400G-B1C PCI Address : 0000:06:00.0 Chip Number : BCM957608 Chip Name : THOR2 Description : Supermicro PCIe 400Gb Single port QSFP56-DD Ethernet Controller ---more--- BCM957608> devid Device Interface Name : gpu0_eth PCI Vendor ID : 0x14E4 PCI Device ID : 0x1760 PCI Revision ID : 0x11 PCI Subsys Vendor ID : 0x15D9 PCI Subsys Device ID : 0x1D42 PCI Address : 0000:06:00.0 BCM957608> device_health_check Device Health Information : SBI Mismatch Check : OK SBI Booted Check : OK SRT Mismatch Check : OK SRT Booted Check : OK CRT Mismatch Check : OK CRT Booted Check : OK Second RT Image : CRT Image Second RT Image Redundancy : Good Image Fastbooted Check : OK Directory Header Booted Check : OK Directory Header Mismatch Check : OK MBR Corrupt Check : OK NVM Configuration : OK FRU Configuration : OK --------------------------------------------- Overall Device Health : Healthy BCM957608> devid Device Interface Name : gpu0_eth PCI Vendor ID : 0x14E4 PCI Device ID : 0x1760 PCI Revision ID : 0x11 PCI Subsys Vendor ID : 0x15D9 PCI Subsys Device ID : 0x1D42 PCI Address : 0000:06:00.0
niccli -i <interface-index> <command>
niccli -list command can be used to
determine the interface index.EXAMPLE
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# niccli --list ------------------------------------------------------------------------------- NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------- BoardId MAC Address FwVersion PCIAddr Type Mode 1) BCM957608 7C:C2:55:BD:75:D0 230.2.49.0 0000:06:00.0 NIC PCI 2) BCM957608 7C:C2:55:BD:79:20 230.2.49.0 0000:23:00.0 NIC PCI 3) BCM957608 7C:C2:55:BD:7D:F0 230.2.49.0 0000:43:00.0 NIC PCI 4) BCM957608 7C:C2:55:BD:7E:20 230.2.49.0 0000:66:00.0 NIC PCI 5) BCM957608 7C:C2:55:BD:75:10 230.2.49.0 0000:86:00.0 NIC PCI 6) BCM957608 7C:C2:55:BD:7D:C0 230.2.49.0 0000:A3:00.0 NIC PCI 7) BCM957608 7C:C2:55:BD:84:90 230.2.49.0 0000:C3:00.0 NIC PCI 8) BCM957608 7C:C2:55:BD:83:10 230.2.49.0 0000:E6:00.0 NIC PCI
The sudo niccli help provides an extensive list of
commands and options available for both interactive and one-line
mode.
-
root@MI300X-01:/home/jnpr# sudo niccli help ------------------------------------------------------------------------------- NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------- Commands sets - Generic/Offline ------------------------------------------------------------------------------- list - Lists all the compatible devices listdev - Lists all the compatible devices (NIC legacy syntax) devid - Query Broadcom device id's. pkgver - Display FW PKG version installed on the device. verify - Verify FW packages & NVM nvm-list - Display NVM components and its associated versions. nvmview - View NVM directories data list-eth - Lists all NIC devices with ethernet interface names help - Lists the available commands quit - Quits from the application Commands for platform 'BCM57xxx Performance NIC' and interface 'Direct PCIe' ------------------------------------------------------------------------------- show - Shows NIC specific device information coredump - Retrieves coredump data from device. snapdump - Retrieves snapdump data from device. version - Display the current version of the application txfir - Network Interface Card Transmission Finite - Impulse Response msixmv - Display and configure the number of MSIX max - vectors values for VF's per each PF scan - Scan PCI devices in the topology pcie - Show/Execute pcie operation nvm - NVRAM Option Management pfalloc - Configure and Query for the number of PFs per PCIe - endpoint rfd - Restores NVM configuration to factory defaults backuppowercfg - Backup Power Configuration tsio - TSIO function capability on the pin ingressqos - Query and configure the ingressqos parameters egressqos - Query and configure the egressqos parameters dutycycle - Set duty cycle on TSIO outgoing signal dllsource - Set the DLL source for PHC vf - Configure and Query for a trusted VF rxportrlmt - Configure the receive side port rate limit rxrlmt - Query the configured receive side rate control parameters rxeprlmt - Configure the receive side rate control parameters for a given endpoint txpartitionrlmt - Query and Configure the transmit side partition rate limit applies to traffic - sent from a partition, which is one PF and all of its child VFs txportrlmt - Query and Configure the transmit side of port rate limit txeprlmt - Query and Configure the PCIe endpoint transmit rate control vf - Configure and Query for a trusted VF pfc - Configure the priority-based flow control for a given priority apptlv - Configure the priority for the AppTLV tcrlmt - Configure the rate limit for each traffic class ets - Configure the enhanced transmission selection, priority to traffic class and bandwidths up2tc - Configure the user priorities to traffic classes getqos - Query the configured enhanced transmission selection, priority to traffic class and bandwidths listmap - List the priority to traffic class and queueid mapping dscp2prio - Query the dscp to priority mapping reset - Reset the device synce - Configure the synchronous ethernet profile dscdump - Retrieves dscdump for device ptp - PTP extended parameters operation prbs_test - Run PRBS loopback test serdes - Plots the serdes pci and ethernet eye and prints the horizontal and vertical margin values Legacy NVM commands : - Query commands --------------------- - --------------- device_info - Query Broadcom device information and default hardware - resources profile version. device_temperature - Query the device temperature in Celsius. get_backup_power_config - Query backup power configuration of the device. moduleinfo - Query the PHY module information. nvm_measurement - Query the active NVM configuration. get_ptp_extended - Query the PTP extended parameters. getoption - Query current NVM configuration option settings - of a device. pcie_counters - Display the pcie counters. saveoptions - Save NVM configuration options on the device - to a file. get_sync_ethernet - Get the synchronous ethernet frequency profile get_txfir - Query the TX FIR settings. cert_provision_state - Query the imported certificate chain on the device. read - Read the NVM item data and write its contents to a file. mh_pf_alloc - Query the number of PFs per PCIe endpoint. - This command is supported only on Thor devices. get_tsio_function_pin - Query TSIO function capability on the pin. Legacy NVM commands : - Debug commands --------------------- - --------------- device_health_check - Checks the device health. backup - Backup NVM contents to a file Legacy NVM commands : - Configuration commands --------------------- - --------------- reset_ap - Reset management processor. setoption - Configure NVM configuration option settings - of a device. msix_max_vectors - Configure the number of MSI-X max vectors per - VF for each PF. loopback - Query/perform loopback config. add_ntuple_filter - Add ntuple flow filter. free_ntuple_filter - Free ntuple flow filter. cfgtunnel - query/config custom tunnel port/rss. write - Create or overwrite NVM data item with a file. set_txfir - Configures the TX FIR settings set_ptp_extended - Set PTP extended parameters mh_pf_alloc - Query/Configure the number of PFs per PCIe endpoint. - This command is supported only on Thor devices. restore_factory_defaults - Restores NVM configuration to factory defaults resmgmt - Query and Configure resources of the device. Legacy NVM commands : - FW update commands --------------------- - --------------- fw_sync - Synchronize primary & secondary FW images livepatch - Query, Activate and Deactivate the patch in live install - Install/Update FW Legacy QoS Rx commands : - Rx Qos commands --------------------- - --------------- rx_port_ratelimit - The user can configure rx rate control that applies to all traffic in a rx CoS queue group. rx_endpoint_ratelimit - The user can configure endpoint rx rate control that applies to all traffic in a rx CoS queue group. get_rx_ratelimits - The user can query the rx rate limits. Legacy QoS Tx commands : - Tx Qos commands --------------------- - --------------- partition_tx_ratelimit - This command is used to configure partition tx rate limit. get_partition_tx_ratelimit - This command is used to query the partition rate limit configuration for a given partition. get_tx_port_ratelimit - This command is used to query the tx side of port rate limit. tx_port_ratelimit - This command is used to configure the tx side of port rate limit tx_endpoint_ratelimit - This command is used to configure PCIe endpoint tx rate limit. get_tx_endpoint_ratelimits - This command is used to query the tx endpoint rate limits. Legacy DCB commands : - Data Center Bridging commands --------------------- - --------------- set_pfc - This command is used to enable PFC on a given priority set_apptlv - This command is used to configure the priority of the AppTLV. ratelimit - This command is used to configure the rate limit for each traffic class. set_ets - This command is used to configure the DCB parameters. set_map - This command is used to configure the priority to traffic class. get_qos - This command is used to query the DCB parameters. dump - This command is used to dump the priority to cos mapping. get_dscp2prio - This command is used to query the dscp to priority mapping.
The following examples show you how to
use niccli to obtain information about a specific
interface.
- Check interface status.
The
niccli -i <interface> showprovides details about the interface such as type, MAC address, firmware, serial number, device health, temperature and so on.EXAMPLE:
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# sudo niccli -i 1 show ------------------------------------------------------------------------------- NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------- NIC State : Up Device Type : THOR2 PCI Vendor ID : 0x14E4 PCI Device ID : 0x1760 PCI Revision ID : 0x11 PCI Subsys Vendor ID : 0x15D9 PCI Subsys Device ID : 0x1D42 Device Interface Name : gpu0_eth MAC Address : 7C:C2:55:BD:75:D0 Base MAC Address : 7C:C2:55:BD:75:D0 Serial Number : OA248S074777 Part Number : AOC-S400G-B1C PCI Address : 0000:06:00.0 Chip Number : BCM957608 Chip Name : THOR2 Description : Supermicro PCIe 400Gb Single port QSFP56-DD Ethernet Controller Firmware Name : PRIMATE_FW Firmware Version : 230.2.49.0 RoCE Firmware Version : 230.2.49.0 HWRM Interface Spec : 1.10.3 Kong mailbox channel : Not Applicable Active Package Version : 230.2.52.0 Package Version on NVM : 230.2.52.0 Active NVM config version : 0.0.5 NVM config version : 0.0.5 Reboot Required : No Firmware Reset Counter : 0 Error Recovery Counter : 0 Crash Dump Timestamp : Not Available Secure Boot : Enabled Secure Firmware Update : Enabled FW Image Status : Operational Crash Dump Available in DDR : No Device Temperature : 57 Celsius PHY Temperature : Not Available Optical Module Temperature : 65 Celsius Device Health : Good
-
- Check QoS settings
sudo niccli -i <interface-index> dscp2prio and sudo niccli -i 1 listmap -pri2cos
-
root@MI300X-01:/home/jnpr# sudo niccli -i 1 dscp2prio ------------------------------------------------------------------------------- NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------- dscp2prio mapping: priority:7 dscp: 48 priority:3 dscp: 26 root@MI300X-01:/home/jnpr# sudo niccli -i 2 listmap -pri2cos ------------------------------------------------------------------------------- NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------- Base Queue is 0 for port 0 ---------------------------- Priority TC Queue ID ------------------------ 0 0 4 1 0 4 2 0 4 3 1 0 4 0 4 5 0 4 6 0 4 7 2 5
The outputs in the example show the defaults for:
- Queues status. Only queues 0, 1, and 2 are enabled.
- Priority to DSCP mappings: priority 7 => DSCP 48 & priority 3 => DSCP 26.
- Priority to TC (traffic class) and queue mappings: priority 7 => TC2 (queue 0) => DSCP 48 & priority 3 => TC1 (queue 5) => DSCP 26.
The sudo niccli -i <interface-index> get_qos
command provides a summary of the QoS configuration on the
interface.
EXAMPLE:
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# sudo niccli -i 1 get_qos ------------------------------------------------------------------------------- NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------- IEEE 8021QAZ ETS Configuration TLV: PRIO_MAP: 0:0 1:0 2:0 3:1 4:0 5:0 6:0 7:2 TC Bandwidth: 50% 50% 0% TSA_MAP: 0:ets 1:ets 2:strict IEEE 8021QAZ PFC TLV: PFC enabled: 3 IEEE 8021QAZ APP TLV: APP#0: Priority: 7 Sel: 5 DSCP: 48 APP#1: Priority: 3 Sel: 5 DSCP: 26 APP#2: Priority: 3 Sel: 3 UDP or DCCP: 4791 TC Rate Limit: 100% 100% 100% 0% 0% 0% 0% 0%
| IEEE 802.1Qaz ETS Configuration TLV: shows the Enhanced Transmission Selection (ETS) configuration | |
|---|---|
| PRIO_MAP: 0:0 1:0 2:0 3:1 4:0 5:0 6:0 7:2 |
Maps priorities to Traffic Classes (TC) Priority 0, 1, 2, 4, 5, 6 → TC 0 Priority 3 → TC 1 Priority 7 → TC 2 |
| TC Bandwidth: 50% 50% 0% |
Allocates bandwidth percentages to traffic classes. TC 0: 50% of the total bandwidth. TC 1: 50%. TC 2: 0%. |
| TSA_MAP: 0:ets 1:ets 2:strict |
Together with TC Bandwidth, TSA_MAP allocates resources and defines service priority for each TC. Equivalent to schedulers & scheduler-map in Junos. Specifies the Transmission Selection Algorithm (TSA) used for each TC: TC 0 and TC 1 use ETS (Enhanced Transmission Selection) and share the available bandwidth 50/50 TC 2 uses strict priority, meaning TC 2 traffic will always be sent first |
| IEEE 802.1Qaz PFC TLV: defines traffic classification using the APP TLV (Type-Length-Value) format | |
| PFC enabled: 3 |
Indicates that PFC is enabled on priority 3. Other priorities do not have PFC enabled. PFC ensures that traffic with this priority can pause instead of being dropped during congestion. |
| IEEE 802.1Qaz APP TLV | |
|
APP#0: Priority: 7 Sel: 5 DSCP: 48 APP#1: Priority: 3 Sel: 5 DSCP: 26 APP#2: Priority: 3 Sel: 3 UDP or DCCP: 4791 |
Maps traffic to Traffic Classes. Equivalent to multifield classifiers in Junos. APP#0: Traffic marked with DSCP = 48 is mapped to priority 7 APP#1: Traffic marked with DSCP = 48 is mapped to priority 3 APP#2: UDP or DCCP traffic with port = 4791 (RoCEv2) is mapped to priority 3 |
| TC Rate Limit: 100% 100% 100% 0% 0% 0% 0% 0% |
TC 0, TC 1, and TC 2 can use up to 100% of the bandwidth allocated to them. TC 3 through TC 7 are set to 0%, meaning they are not currently configured to transmit traffic. |
If needed, change the priority to traffic class mappings or the applications to traffic class mappings.
We recommend keeping the default settings and making sure they are consistent with the class-of-service configuration on the leaf nodes in the GPU backend fabric.
-
[edit class-of-service classifiers] jnpr@gpu-backend-rack1-001-leaf1# show dscp mydscp { forwarding-class CNP { loss-priority low code-points 110000; <= DSCP = 48 } forwarding-class NO-LOSS { loss-priority low code-points 011010; <= DSCP = 26 } } } [edit class-of-service forwarding-classes] jnpr@gpu-backend-rack1-001-leaf1# show class CNP queue-num 3; class NO-LOSS queue-num 4 no-loss pfc-priority 3;
If there are any requirements to change the priority to traffic class mappings or the applications to traffic class mappings the following commands can be used:
Priority to traffic class mappings
-
BCM957608> help up2tc DESCRIPTION : This command is used to set the user priorities to traffic classes. SYNTAX : up2tc -p <priority[0-7]:tc>, ...> -p: Comma separated list mapping user priorities to traffic classes.
EXAMPLE:
-
BCM957608> sudo niccli -i 1 get_qos ------------------------------------------------------------------------------- NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------- IEEE 8021QAZ ETS Configuration TLV: PRIO_MAP: 0:1 1:1 2:0 3:0 4:1 5:1 6:0 7:0 <= default ---more--- BCM957608> up2tc -p 0:0,1:0,2:1,3:1,4:1,5:1,6:1,7:0 User priority to traffic classes are configured successfully. BCM957608> sudo niccli -i 1 get_qos ------------------------------------------------------------------------------- NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------- IEEE 8021QAZ ETS Configuration TLV: PRIO_MAP: 0:0 1:0 2:1 3:1 4:1 5:1 6:1 7:0 ---more---
Applications to traffic class mappings
-
BCM957608> help apptlv DESCRIPTION : This command is used to configure the priority of the AppTLV SYNTAX : apptlv -add -app <priority,selector,protocol> apptlv -del -app <priority,selector,protocol>
EXAMPLE:
-
BCM957608> sudo niccli -i 1 get_qos ---more--- IEEE 8021QAZ APP TLV: APP#1: Priority: 7 Sel: 5 DSCP: 48 APP#2: Priority: 3 Sel: 5 DSCP: 26 APP#3: Priority: 3 Sel: 3 UDP or DCCP: 4791 BCM957608> apptlv -add -app 5,1,35093 AppTLV configured successfully. BCM957608> sudo niccli -i 1 get_qos ---more--- IEEE 8021QAZ APP TLV: APP#0: Priority: 5 Sel: 1 Ethertype: 0x8915 APP#1: Priority: 7 Sel: 5 DSCP: 48 APP#2: Priority: 3 Sel: 5 DSCP: 26 APP#3: Priority: 3 Sel: 3 UDP or DCCP: 4791 BCM957608> BCM957608> apptlv -del -app 5,1,35093 AppTLV deleted successfully. BCM957608> sudo niccli -i 1 get_qos ---more--- IEEE 8021QAZ APP TLV: APP#0: Priority: 7 Sel: 5 DSCP: 48 APP#1: Priority: 3 Sel: 5 DSCP: 26 APP#2: Priority: 3 Sel: 3 UDP or DCCP: 4791 ---more---
If needed, change ETS configuration attributes.
We recommend keeping the default settings and making sure they are consistent with the class-of-service configuration on the leaf nodes in the GPU backend fabric.
-
[edit class-of-service forwarding-classes] jnpr@gpu-backend-rack1-001-leaf1# show class CNP queue-num 3; class NO-LOSS queue-num 4 no-loss pfc-priority 3; BCM957608> help ets DESCRIPTION : This command is used to configure the enhanced transmission selection, priority to traffic class and traffic class bandwidths. SYNTAX : ets -tsa <tc[0-7]:[ets|strict], ...> -up2tc <priority[0-7]:tc>, ...> -tcbw <list> -tsa: Transmission selection algorithm, sets a comma separated list of traffic classes to the corresponding selection algorithm. Valid algorithms include "ets" and "strict". -up2tc: Comma separated list mapping user priorities to traffic classes. -tcbw: Comma separated list of bandwidths for each traffic class the first value being assigned to traffic class 0 and the second to traffic class 1 and so on.
EXAMPLE:
-
BCM957608> sudo niccli -i 1 get_qos NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------- IEEE 8021QAZ ETS Configuration TLV: PRIO_MAP: 0:1 1:1 2:0 3:0 4:1 5:1 6:0 7:0 TC Bandwidth: 50% 50% 0% TSA_MAP: 0:ets 1:ets 2:strict IEEE 8021QAZ PFC TLV: PFC enabled: 3 ---more--- BCM957608> ets -tsa 0:ets,1:ets,2:ets -up2tc 0:0,1:0,2:0,3:0,4:0,5:1,6:0,7:0 -tcbw 50,25,25 Enhanced transmission selection (ets) configured successfully. BCM957608> sudo niccli -i 1 get_qos NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------- IEEE 8021QAZ ETS Configuration TLV: PRIO_MAP: 0:0 1:0 2:0 3:0 4:0 5:1 6:0 7:0 TC Bandwidth: 50% 25% 25% TSA_MAP: 0:ets 1:ets 2:ets
If needed, configure PFC
-
BCM957608> help pfc DESCRIPTION : This command is used to enable priority-based flow control on a given priority. SYNTAX : pfc -enable <pfc list> The valid range is from 0 to 7. Where list is a comma-separated value for each pfc. To disable the pfc, user needs to provide a value of 0xFF.
EXAMPLE:
-
BCM957608> sudo niccli -i 1 get_qos ---more--- IEEE 8021QAZ PFC TLV: PFC enabled: 3 <= default; PFC enabled for priority 3 ---more--- BCM957608> pfc -enable 0xFF <= disables pfc on all priorities. pfc configured successfully. BCM957608> sudo niccli -i 1 get_qos ---more--- IEEE 8021QAZ PFC TLV: PFC enabled: none <= pfc disabled on all priorities. ---more--- BCM957608> pfc -enable 5 pfc configured successfully. BCM957608> sudo niccli -i 1 get_qos ---more--- IEEE 8021QAZ PFC TLV: PFC enabled: 5 <= PFC enabled for priority 5 ---more---
The following command attempts to enable the pfc on priority 5 and 6 and demonstrates that only one queue (one priority) can be configured as a lossless queue (PFC-enabled).
-
BCM957608> pfc -enable 5,6 ERROR: Hardware doesn't support more than 1 lossless queues to configure pfc. ERROR: Failed to enable pfc.
Configuring DCQCN and RoCE traffic marking values using bnxt_setupcc.sh
Using the
bnxt_setupcc.sh
utility, which can simplify the process.
The
bnxt_setupcc.sh
utility simplifies enabling or disabling both ECN and PFC and
changing the values of DSCP and PRIO for both ROCE and CNP packets
for a given interface.
Under the hood it uses niccli (default) or
lldptool which can be selected as part of the
command.
You need to enter bnxt_setupcc.sh followed by your
selected options as described in the help menu:
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# bnxt_setupcc.sh Usage: bnxt_setupcc.sh [OPTION]... -d RoCE Device Name (e.g. bnxt_re0, bnxt_re_bond0) -i Ethernet Interface Name (e.g. p1p1 or for bond, specify slave interfaces like -i p6p1 -i p6p2) -m [1-3] 1 - PFC only 2 - CC only 3 - PFC + CC mode -v 1 - Enable priority vlan -r [0-7] RoCE Packet Priority -s VALUE RoCE Packet DSCP Value -c [0-7] RoCE CNP Packet Priority -p VALUE RoCE CNP Packet DSCP Value -b VALUE RoCE Bandwidth percentage for ETS configuration - Default is 50% -t [2] Default mode (Only RoCE v2 is supported - Input Ignored) -C VALUE Set CNP Service Type -u [1-3] Utility to configure QoS settings 1 - Use bnxtqos utility. Will disable lldptool if enabled. (default) 2 - Use lldptool 3 - Use Broadcom niccli utility. Will disable lldptool if enabled. -h display help
EXAMPLE:
The default DSCP marking for CNP packets for interface gpu0 (bnxt_re0) is 0 as shown in the output below:
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat apply | grep cnp ecn status (cnp_ecn) : Enabled cnp header ecn status (cnp_ecn) : ECT(1) minimum time between cnps (min_time_bet_cnp) : 0x0 usec rate reduction threshold (cnp_ratio_th) : 0x0 cnps cnp prio (cnp_prio) : 7 cnp dscp (cnp_dscp) : 0 root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat apply | grep cc congestion control mode (cc_mode) : DCQCN-P cr threshold to reset cc (reset_cc_cr_th) : 0x32a cc ack bytes (cc_ack_bytes) : 0x44 root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat cnp_prio 0x7 root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat cnp_dscp 0x0
bnxt_setupcc.sh can be used to change it to the
value expected by the fabric (48) as follows:
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# bnxt_setupcc.sh -d bnxt_re0 -i gpu0_eth -u 3 -p 48 -c 6 -s 26 -r 5 -m 3 ENABLE_PFC = 1 ENABLE_CC = 1 ENABLE_DSCP = 1 ENABLE_DSCP_BASED_PFC = 1 L2 50 RoCE 50 Using Ethernet interface gpu0_eth and RoCE interface bnxt_re0 Setting pfc/ets 0000:06:00.0 ---more--- AppTLV configured successfully.
Where:
- -u 3: Uses Broadcom niccli utility
- -p 48: Sets the DSCP value for CNP packets to 48 (0x30)
- -c: Configures the priority for CNP packets to 6
- -s: Defines the DSCP value for regular RoCE packets to 26 (0x1a)
- -r: Sets the priority for regular RoCE packets to 5
- -m 3: Configures both PFC and congestion control (ECN).
Verify the results with:
-
root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat apply | grep cnp ecn status (cnp_ecn) : Enabled cnp header ecn status (cnp_ecn) : ECT(1) minimum time between cnps (min_time_bet_cnp) : 0x0 usec rate reduction threshold (cnp_ratio_th) : 0x0 cnps cnp prio (cnp_prio) : 6 cnp dscp (cnp_dscp) : 48 root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat apply | grep roce roce prio (roce_prio) : 5 roce dscp (roce_dscp) : 26 root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat cnp_prio 0x6 root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat cnp_dscp 0x30 <= 48 is HEX root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat roce_dscp 0x1a <= 26 is HEX root@MI300X-01:/sys/kernel/config/bnxt_re/bnxt_re0/ports/1/cc# cat roce_prio 0x5
bnxt_setupcc.sh is installed and executable, but also
that at least one of the tools (niccli or
lldptool) is installed.The following example shows that bnxt_setupcc.sh
and niccli are installed, but lldptool is
not. It also shows examples of installing and using the
lldptool.
-
root@MI300X-01:/# which bnxt_setupcc.sh /usr/local/bin/bnxt_setupcc.sh root@MI300X-01:/usr/local/bin# ls bnxt_setupcc.sh -l -rwxr-xr-x 1 root root 14761 Jan 17 18:06 bnxt_setupcc.sh root@MI300X-01:/$ which niccli /usr/bin/niccli root@MI300X-01:/usr/bin$ ls niccli -l lrwxrwxrwx 1 18896 1381 18 Sep 25 18:52 niccli -> /opt/niccli/niccli root@MI300X-01:/opt/niccli$ ls niccli -l -rwxr-xr-x 1 18896 1381 609 Sep 25 18:52 niccli root@MI300X-01:/$ which lldptool
The lldptool is used to check or modify the LLDP
(Link Layer Discovery Protocol) settings. To enable LLDP you need
to install lldpad, which also installs
lldptool automatically.
To install lldpad and
lldptool follow these steps:
- Install required dependencies.
Before installing lldpad, ensure that the necessary libraries are installed by running the following command:
-
sudo apt install libconfig9 libnl-3-200
- libconfig9 – A configuration file processing library.
- libnl-3-200 – A library for interacting with the Linux Netlink interface.
-
- Install lldpad.
Install lldpad by running the following command:
-
sudo apt install lldpad
This package enables LLDP on the system, allowing it to exchange network topology information with other devices.
-
- Enable lldpad.
Enable lldp using systemctl:
-
sudo systemctl enable lldpad
This creates a system service that ensures lldpad is always running after a reboot.
-
- Start the lldpad service
Activate lldp using systemctl:
-
sudo systemctl start lldpad
This activates lldpad immediately, allowing it to process LLDP packets.
NOTE:To restart lldpad manually, use:sudo systemctl restart lldpad
To disable lldpad from starting at boot, use:sudo systemctl disable lldpad -
- Verify the installation
Check the service status using systemctl
-
user@MI300X-01:/etc/apt$ sudo systemctl status lldpad ● lldpad.service - Link Layer Discovery Protocol Agent Daemon. Loaded: loaded (/usr/lib/systemd/system/lldpad.service; enabled; preset: enabled) Active: active (running) since Fri 2025-02-14 00:16:40 UTC; 2min 2s ago TriggeredBy: ● lldpad.socket Docs: man:lldpad(8) Main PID: 695860 (lldpad) Tasks: 1 (limit: 629145) Memory: 1.3M (peak: 2.0M) CPU: 510ms CGroup: /system.slice/lldpad.service └─695860 /usr/sbin/lldpad -t Feb 14 00:16:40 MI300X-01 systemd[1]: Started lldpad.service - Link Layer Discovery Protocol Agent Daemon..
This ensures that the tool is installed and ready to use. If everything is working properly, you should see an "active (running)" status.
You can use lldptool to enable or disable LLDP on an interface, and to check the LLDP status and the neighbors discovered on that interface. The lldptool -h shows you all the different options:
-
user@MI300X-01:/etc/apt$ lldptool -h Usage: lldptool <command> [options] [arg] general command line usage format lldptool go into interactive mode <command> [options] [arg] general interactive command format Options: -i [ifname] network interface -V [tlvid] TLV identifier may be numeric or keyword (see below) -c <argument list> used with get TLV command to specify that the list of configuration elements should be retrieved -d use to delete specified argument from the configuration. (Currently implemented for DCBX App TLV settings) -n "neighbor" option for command -r show raw message -R show only raw messages -g destination agent (may be one of): - nearestbridge (nb) (default) - nearestcustomerbridge (ncb) - nearestnontpmrbridge (nntpmrb) Commands: license show license information -h|help show command usage information -v|version show version -p|ping ping lldpad and query pid of lldpad -q|quit exit lldptool (interactive mode) -S|stats get LLDP statistics for ifname -t|get-tlv get TLVs from ifname -T|set-tlv set arg for tlvid to value -l|get-lldp get the LLDP parameters for ifname -L|set-lldp set the LLDP parameter for ifname TLV identifiers: chassisID : Chassis ID TLV portID : Port ID TLV TTL : Time to Live TLV portDesc : Port Description TLV sysName : System Name TLV sysDesc : System Description TLV sysCap : System Capabilities TLV mngAddr : Management Address TLV macPhyCfg : MAC/PHY Configuration Status TLV powerMdi : Power via MDI TLV linkAgg : Link Aggregation TLV MTU : Maximum Frame Size TLV LLDP-MED : LLDP-MED Settings medCap : LLDP-MED Capabilities TLV medPolicy : LLDP-MED Network Policy TLV medLoc : LLDP-MED Location TLV medPower : LLDP-MED Extended Power-via-MDI TLV medHwRev : LLDP-MED Hardware Revision TLV medFwRev : LLDP-MED Firmware Revision TLV medSwRev : LLDP-MED Software Revision TLV medSerNum : LLDP-MED Serial Number TLV medManuf : LLDP-MED Manufacturer Name TLV medModel : LLDP-MED Model Name TLV medAssetID : LLDP-MED Asset ID TLV CIN-DCBX : CIN DCBX TLV CEE-DCBX : CEE DCBX TLV evb : EVB Configuration TLV evbcfg : EVB draft 0.2 Configuration TLV vdp : VDP draft 0.2 protocol configuration IEEE-DCBX : IEEE-DCBX Settings ETS-CFG : IEEE 8021QAZ ETS Configuration TLV ETS-REC : IEEE 8021QAZ ETS Recommendation TLV PFC : IEEE 8021QAZ PFC TLV APP : IEEE 8021QAZ APP TLV PVID : Port VLAN ID TLV PPVID : Port and Protocol VLAN ID TLV vlanName : VLAN Name TLV ProtoID : Protocol Identity TLV vidUsage : VID Usage Digest TLV mgmtVID : Management VID TLV linkAggr : Link Aggregation TLV uPoE : Cisco 4-wire Power-via-MDI TLV user@MI300X-01:/etc/apt$ sudo lldptool -S -i gpu0_eth Total Frames Transmitted = 0 Total Discarded Frames Received = 0 Total Error Frames Received = 0 Total Frames Received = 92 Total Discarded TLVs = 0 Total Unrecognized TLVs = 8 Total Ageouts = 0 user@MI300X-01:/etc/apt$ sudo lldptool -L -i gpu0_eth AMDinStatus=rxtx AMDinStatus = rxtx user@MI300X-01:/etc/apt$ sudo lldptool -S -i gpu0_eth Total Frames Transmitted = 5 Total Discarded Frames Received = 0 Total Error Frames Received = 0 Total Frames Received = 94 Total Discarded TLVs = 0 Total Unrecognized TLVs = 8 Total Ageouts = 0 user@MI300X-01:/etc/apt$ sudo lldptool -t -i gpu0_eth Chassis ID TLV MAC: 7c:c2:55:bd:75:d0 Port ID TLV MAC: 7c:c2:55:bd:75:d0 Time to Live TLV 120 IEEE 8021QAZ ETS Configuration TLV Willing: yes CBS: not supported MAX_TCS: 3 PRIO_MAP: 0:0 1:0 2:0 3:0 4:0 5:0 6:0 7:0 TC Bandwidth: 0% 0% 0% 0% 0% 0% 0% 0% TSA_MAP: 0:strict 1:strict 2:strict 3:strict 4:strict 5:strict 6:strict 7:strict IEEE 8021QAZ PFC TLV Willing: yes MACsec Bypass Capable: no PFC capable traffic classes: 1 PFC enabled: none End of LLDPDU TLV
Check the Installing and Configuring Software Manually section of the Broadcom Ethernet Network Adapter User Guide or Installing the NICCLI Configuration Utility for more details.
Monitor interface and ECN/PFC operation:
Once you have the Broadcom name for a particular gpu as described at the beginning of this section, you can locate the directories where the interface’s operation status, as well as RoCE traffic and Congestion Control statistics are located.
- Navigate to the corresponding directory
/sys/class/infiniband/<Broadcom-interface-name>
EXAMPLE:
For gpu0_eth:
-
root@MI300X-01:/home/jnpr/SCRIPTS# cd /sys/class/infiniband/bnxt_re3 root@MI300X-01:/sys/class/infiniband/bnxt_re3# ls device fw_ver hca_type hw_rev node_desc node_guid node_type ports power subsystem sys_image_guid uevent root@MI300X-01:/sys/class/infiniband/bnxt_re3# ls device/net/gpu3_eth/ addr_assign_type address addr_len broadcast carrier carrier_changes carrier_down_count carrier_up_count device dev_id dev_port dormant duplex flags gro_flush_timeout ifalias ifindex iflink link_mode mtu name_assign_type napi_defer_hard_irqs netdev_group operstate phys_port_id phys_port_name phys_switch_id power proto_down queues speed statistics subsystem testing threaded tx_queue_len type uevent
Here you can check attributes such as operational state, address, mtu, speed, and interface statistics (including transmit and received packets, dropped packets, as well as ECN-marked packets, CNP packets received and CNP packets transmitted):
-
root@MI300X-01:/sys/class/infiniband/bnxt_re3# cat device/net/gpu3_eth/operstate up root@MI300X-01:/sys/class/infiniband/bnxt_re3# cat device/net/gpu3_eth/address 7c:c2:55:bd:7e:20 root@MI300X-01:/sys/class/infiniband/bnxt_re3# cat device/net/gpu3_eth/mtu 9000 root@MI300X-01:/sys/class/infiniband/bnxt_re3# cat device/net/gpu3_eth/speed 400000 root@MI300X-01:/sys/class/infiniband/bnxt_re3# ls device/net/gpu3_eth/statistics collisions multicast rx_bytes rx_compressed rx_crc_errors rx_dropped rx_errors rx_fifo_errors rx_frame_errors rx_length_errors rx_missed_errors rx_nohandler rx_over_errors rx_packets tx_aborted_errors tx_bytes tx_carrier_errors tx_compressed tx_dropped tx_errors tx_fifo_errors tx_heartbeat_errors tx_packets tx_window_errors tx_fifo_errors rx_dropped rx_frame_errors rx_nohandlertx_aborted_errors tx_compressed tx_window_errors root@MI300X-01:/sys/class/infiniband/bnxt_re3# ls ports/1 cap_mask cm_rx_duplicates cm_rx_msgs cm_tx_msgs cm_tx_retries counters gid_attrs gids hw_counters lid lid_mask_count link_layer phys_state pkeys rate sm_lid sm_sl state root@MI300X-01:/sys/class/infiniband/bnxt_re3# ls ports/1/counters/ -m excessive_buffer_overrun_errors link_downed link_error_recovery local_link_integrity_errors port_rcv_constraint_errors port_rcv_data port_rcv_errors port_rcv_packets port_rcv_remote_physical_errors port_rcv_switch_relay_errors port_xmit_constraint_errors port_xmit_data port_xmit_discards port_xmit_packets port_xmit_wait symbol_error VL15_dropped
To check ECN statistics, check the related counters for the specific interface:
-
root@MI300X-01:/sys/class/infiniband/bnxt_re3# ls ports/1/hw_counters/ -m active_ahs active_cqs active_mrs active_mws active_pds active_qps active_rc_qps active_srqs active_ud_qps bad_resp_err db_fifo_register dup_req lifespan local_protection_err local_qp_op_err max_retry_exceeded mem_mgmt_op_err missing_resp oos_drop_count pacing_alerts pacing_complete pacing_reschedule recoverable_errors remote_access_err remote_invalid_req_err remote_op_err res_cmp_err res_cq_load_err res_exceed_max res_exceeds_wqe res_invalid_dup_rkey res_irrq_oflow resize_cq_cnt res_length_mismatch res_mem_err res_opcode_err res_rem_inv_err res_rx_domain_err res_rx_invalid_rkey res_rx_no_perm res_rx_pci_err res_rx_range_err res_srq_err res_srq_load_err res_tx_domain_err res_tx_invalid_rkey res_tx_no_perm res_tx_pci_err res_tx_range_err res_unaligned_atomic res_unsup_opcode res_wqe_format_err rnr_naks_rcvd rx_atomic_req rx_bytes rx_cnp_pkts rx_ecn_marked_pkts rx_good_bytes rx_good_pkts rx_out_of_buffer rx_pkts rx_read_req rx_read_resp rx_roce_discards rx_roce_errors rx_roce_only_bytes rx_roce_only_pkts rx_send_req rx_write_req seq_err_naks_rcvd to_retransmits tx_atomic_req tx_bytes tx_cnp_pkts tx_pkts tx_read_req tx_read_resp tx_roce_discards tx_roce_errors tx_roce_only_bytes tx_roce_only_pkts tx_send_req tx_write_req unrecoverable_err watermark_ahs watermark_cqs watermark_mrs watermark_mws watermark_pds watermark_qps watermark_rc_qps watermark_srqs watermark_ud_qps root@MI300X-01:/sys/class/infiniband# for iface in /sys/class/infiniband/*/ports/1/hw_counters/rx_ecn_marked_pkts; do echo "$(basename $(dirname $(dirname $(dirname $(dirname "$iface"))))) : $(cat "$iface")" done bnxt_re0 : 0 bnxt_re1 : 1102 bnxt_re2 : 532 bnxt_re3 : 707 bnxt_re4 : 474 bnxt_re5 : 337 bnxt_re6 : 970 bnxt_re7 : 440 root@MI300X-01:/sys/class/infiniband# for iface in /sys/class/infiniband/*/ports/1/hw_counters/tx_cnp_pkts; do echo "$(basename $(dirname $(dirname $(dirname $(dirname "$iface"))))) : $(cat "$iface")" done bnxt_re0 : 0 bnxt_re1 : 1102 bnxt_re2 : 532 bnxt_re3 : 707 bnxt_re4 : 474 bnxt_re5 : 337 bnxt_re6 : 970 bnxt_re7 : 440 root@MI300X-01:/sys/class/infiniband# for iface in /sys/class/infiniband/*/ports/1/hw_counters/rx_cnp_pkts; do echo "$(basename $(dirname $(dirname $(dirname $(dirname "$iface"))))) : $(cat "$iface")" done bnxt_re0 : 0 bnxt_re1 : 830 bnxt_re2 : 0 bnxt_re3 : 375 bnxt_re4 : 734 bnxt_re5 : 23 bnxt_re6 : 2395 bnxt_re7 : 2291
ethtool -s <InterfaceIndex> |egrep "pfc_frames|roce_pause" |more
EXAMPLE:
-
root@MI300X-01:/sys/class/infiniband# for iface in $(ls /sys/class/net/ | grep '^gpu'); do echo "$iface :" sudo ethtool -S "$iface" | egrep "pfc_frames|roce_pause" done gpu0_eth : rx_pfc_frames: 0 tx_pfc_frames: 22598 continuous_roce_pause_events: 0 resume_roce_pause_events: 0 gpu1_eth : rx_pfc_frames: 0 tx_pfc_frames: 194626 continuous_roce_pause_events: 0 resume_roce_pause_events: 0 gpu2_eth : rx_pfc_frames: 0 tx_pfc_frames: 451620 continuous_roce_pause_events: 0 resume_roce_pause_events: 0 gpu3_eth : rx_pfc_frames: 0 tx_pfc_frames: 492042 continuous_roce_pause_events: 0 resume_roce_pause_events: 0 gpu4_eth : rx_pfc_frames: 0 tx_pfc_frames: 407113 continuous_roce_pause_events: 0 resume_roce_pause_events: 0 gpu5_eth : rx_pfc_frames: 0 tx_pfc_frames: 290378 continuous_roce_pause_events: 0 resume_roce_pause_events: 0 gpu6_eth : rx_pfc_frames: 0 tx_pfc_frames: 228918 continuous_roce_pause_events: 0 resume_roce_pause_events: 0 gpu7_eth : rx_pfc_frames: 0 tx_pfc_frames: 477572 continuous_roce_pause_events: 0 resume_roce_pause_events: 0 root@MI300X-01:/sys/class/infiniband# for iface in $(ls /sys/class/net/ | grep '^gpu'); do echo "$iface :" sudo ethtool -S "$iface" | grep cos | grep -v ": 0" done gpu0_eth : rx_bytes_cos0: 9529443988084 rx_packets_cos0: 3319036491 rx_bytes_cos4: 18230144638154 rx_packets_cos4: 5955503873 rx_discard_bytes_cos4: 3032625534 rx_discard_packets_cos4: 736191 tx_bytes_cos0: 27757371721830 tx_packets_cos0: 9297694711 tx_bytes_cos4: 604920 tx_packets_cos4: 2628 gpu1_eth : rx_bytes_cos0: 27969554019118 rx_packets_cos0: 9565740297 rx_bytes_cos4: 4193860 rx_packets_cos4: 47350 tx_bytes_cos0: 27738638134736 tx_packets_cos0: 9184463836 tx_bytes_cos4: 619484 tx_packets_cos4: 2686 tx_bytes_cos5: 81548 tx_packets_cos5: 1102 gpu2_eth : rx_bytes_cos0: 27961559203510 rx_packets_cos0: 9438688373 rx_bytes_cos4: 4134654 rx_packets_cos4: 46526 tx_bytes_cos0: 27177768852872 tx_packets_cos0: 9028738664 tx_bytes_cos4: 619444 tx_packets_cos4: 2686 tx_bytes_cos5: 39368 tx_packets_cos5: 532 gpu3_eth : rx_bytes_cos0: 27886187894460 rx_packets_cos0: 9394306658 rx_bytes_cos4: 4161424 rx_packets_cos4: 46910 tx_bytes_cos0: 27963541263338 tx_packets_cos0: 9314918707 tx_bytes_cos4: 619624 tx_packets_cos4: 2688 tx_bytes_cos5: 52318 tx_packets_cos5: 707 gpu4_eth : rx_bytes_cos0: 27760098268028 rx_packets_cos0: 9493708902 rx_bytes_cos4: 4190302 rx_packets_cos4: 47275 tx_bytes_cos0: 27943026331154 tx_packets_cos0: 9175330615 tx_bytes_cos4: 619068 tx_packets_cos4: 2683 tx_bytes_cos5: 35076 tx_packets_cos5: 474 gpu5_eth : rx_bytes_cos0: 27742656661456 rx_packets_cos0: 9603877462 rx_bytes_cos4: 4136456 rx_packets_cos4: 46558 tx_bytes_cos0: 27862529155204 tx_packets_cos0: 9053600792 tx_bytes_cos4: 619318 tx_packets_cos4: 2686 tx_bytes_cos5: 24938 tx_packets_cos5: 337 gpu6_eth : rx_bytes_cos0: 27204139187706 rx_packets_cos0: 9417550449 rx_bytes_cos4: 4309610 rx_packets_cos4: 48912 tx_bytes_cos0: 27939647032856 tx_packets_cos0: 9122722262 tx_bytes_cos4: 619248 tx_packets_cos4: 2685 tx_bytes_cos5: 71780 tx_packets_cos5: 970 gpu7_eth : rx_bytes_cos0: 27985967658372 rx_packets_cos0: 9636086344 rx_bytes_cos4: 4303716 rx_packets_cos4: 48823 tx_bytes_cos0: 27949102839310 tx_packets_cos0: 9149097911 tx_bytes_cos4: 619138 tx_packets_cos4: 2684 tx_bytes_cos5: 32560 tx_packets_cos5: 440 BCM957608> sudo niccli -i 2 listmap -pri2cos ------------------------------------------------------------------------------- NIC CLI v231.2.63.0 - Broadcom Inc. (c) 2024 (Bld-94.52.34.117.16.0) ------------------------------------------------------------------------------- Base Queue is 0 for port 0 ---------------------------- Priority TC Queue ID ------------------------ 0 0 4 1 0 4 2 0 4 3 1 0 4 0 4 5 0 4 6 0 4 7 2 5
Configuring the server to use the management interface for RCCL control traffic:
ROCm Communication Collectives Library (RCCL) creates TCP sessions to coordinate processes and exchange Queue Pair information for RoCE, GIDs (Global IDs), Local and remote buffer addresses, RDMA keys (RKEYs for memory access permissions)
These TCP sessions are created when the job starts and by default use one of the GPU interfaces (same interfaces used for RoCEv2 traffic).
Example:
-
jnpr@MI300X-01:~$ netstat -atn | grep 10.200 | grep "ESTABLISHED" tcp 0 0 10.200.4.8:47932 10.200.4.2:43131 ESTABLISHED tcp 0 0 10.200.4.8:46699 10.200.4.2:37236 ESTABLISHED tcp 0 0 10.200.2.8:60502 10.200.13.2:35547 ESTABLISHED tcp 0 0 10.200.4.8:37330 10.200.4.2:55355 ESTABLISHED tcp 0 0 10.200.4.8:56438 10.200.4.2:53947 ESTABLISHED ---more---
It is recommended that the management interface connected to the (Frontend Fabric) is used. To achieve this, include the following when starting a job: export NCCL_SOCKET_IFNAME="mgmt_eth". The same environment variable applies to both NCCL and RCCL.
Example:
-
jnpr@MI300X-01:~$ netstat -atn | grep 10.10.1 | grep "ESTABLISHED" tcp 0 0 10.10.1.0:44926 10.10.1.2:33149 ESTABLISHED tcp 0 0 10.10.1.0:46705 10.10.1.0:40320 ESTABLISHED tcp 0 0 10.10.1.0:54661 10.10.1.10:52452 ESTABLISHED ---more---
AMD Pollara DCQCN configuration for RDMA Traffic
For the AMD Pollara validation, DCQCN needs to be enabled, and QOS has to be applied on the AMD NIC cards.
- Configure QOS on the NICs using the script. The DSCP parameters
are equivalent to the values suggested in Table 25. Server DCQCN
configuration parameters.
-
jnpr@mi300-01:~$ cat /usr/local/bin/jnpr-setupqos.sh #!/bin/bash for i in $(sudo /usr/sbin/nicctl show port | grep Port | awk {'print $3'}); do sudo /usr/sbin/nicctl update port -p $i --pause-type pfc --rx-pause enable --tx-pause enable; done cts_dscp=48 cts_prio=2 data_dscp=26 data_prio=3 sudo nicctl update qos --classification-type dscp sudo nicctl update qos dscp-to-priority --dscp $cts_dscp --priority $cts_prio sudo nicctl update qos dscp-to-priority --dscp $data_dscp --priority $data_prio sudo nicctl update qos pfc --priority $cts_prio --no-drop enable sudo nicctl update qos pfc --priority $data_prio --no-drop enable sudo nicctl update qos dscp-to-purpose --dscp $cts_dscp --purpose xccl-cts
-
- Using AMD
nicctlcommand line Utility below are the QOS parameters configured:-
jnpr@mi300-01:~$ sudo nicctl show qos | more NIC : 42424650-4c32-3530-3130-313346000000 (0000:06:00.0) Port : 0490812b-9860-4242-4242-000011010000 Classification type : DSCP DSCP-to-priority : DSCP bitmap : 0xfffefffffbffffff ==> priority : 0 DSCP bitmap : 0x0001000000000000 ==> priority : 2 DSCP bitmap : 0x0000000004000000 ==> priority : 3 DSCP : 0-25, 27-47, 49-63 ==> priority : 0 DSCP : 48 ==> priority : 2 DSCP : 26 ==> priority : 3 DSCP-to-purpose : 48 ==> xccl-cts PFC : PFC priority bitmap : 0xc PFC no-drop priorities : 2,3 Scheduling : -------------------------------------------- Priority Scheduling Bandwidth Rate-limit Type (in %age) (in Gbps) -------------------------------------------- 0 DWRR 0 N/A 2 DWRR 0 N/A 3 DWRR 0 N/A NIC : 42424650-4c32-3530-3130-313844000000 (0000:23:00.0) Port : 0490812b-9fb0-4242-4242-000011010000 Classification type : DSCP DSCP-to-priority : DSCP bitmap : 0xfffefffffbffffff ==> priority : 0 DSCP bitmap : 0x0001000000000000 ==> priority : 2 DSCP bitmap : 0x0000000004000000 ==> priority : 3 DSCP : 0-25, 27-47, 49-63 ==> priority : 0 DSCP : 48 ==> priority : 2 DSCP : 26 ==> priority : 3 DSCP-to-purpose : 48 ==> xccl-cts PFC : PFC priority bitmap : 0xc PFC no-drop priorities : 2,3 --More--
-
- The
rdma linkcommand can be used to check if the roce-devices association to the AMD Pollara NIC cards exist.-
jnpr@mi300-01:~$ rdma link | grep gpu link rocep9s0/1 state ACTIVE physical_state LINK_UP netdev gpu0_eth link rocep38s0/1 state ACTIVE physical_state LINK_UP netdev gpu1_eth link rocep70s0/1 state ACTIVE physical_state LINK_UP netdev gpu2_eth link roceo1/1 state ACTIVE physical_state LINK_UP netdev gpu3_eth link rocep137s0/1 state ACTIVE physical_state LINK_UP netdev gpu4_eth link rocep166s0/1 state ACTIVE physical_state LINK_UP netdev gpu5_eth link rocep198s0/1 state ACTIVE physical_state LINK_UP netdev gpu6_eth link rocep233s0/1 state ACTIVE physical_state LINK_UP netdev gpu7_eth
The roce-devices are created when the ionic_rdma kernel module is loaded and should create the below roce-device file for each NIC card.
-
jnpr@mi300-01:/sys/class/infiniband$ find /sys/class/infiniband -type l /sys/class/infiniband/rocep137s0 /sys/class/infiniband/rocep38s0 /sys/class/infiniband/rocep70s0 /sys/class/infiniband/roceo1 /sys/class/infiniband/rocep166s0 /sys/class/infiniband/rocep233s0 /sys/class/infiniband/rocep198s0 /sys/class/infiniband/rocep9s0
-
- To configure DCQCN on the AMD Pollara NICs, run the script
below with appropriate parameters.
-
jnpr @mi300-01:~$ cat /usr/local/bin/jnpr-enable-dcqcn.sh #!/bin/bash TOKEN_BUCKET_SIZE=800000 AI_RATE=160 ALPHA_UPDATE_INTERVAL=1 ALPHA_UPDATE_G=512 INITIAL_ALPHA_VALUE=64 RATE_INCREASE_BYTE_COUNT=431068 HAI_RATE=300 RATE_REDUCE_MONITOR_PERIOD=1 RATE_INCREASE_THRESHOLD=1 RATE_INCREASE_INTERVAL=1 CNP_DSCP=48 ROCE_DEVICES=$(rdma link | grep gpu | awk '{ print $2 }' | awk -F/ '{ print $1 }' | paste -sd " ") for roce_dev in $ROCE_DEVICES do sudo nicctl update dcqcn -r $roce_dev -i 1 \ --token-bucket-size $TOKEN_BUCKET_SIZE \ --ai-rate $AI_RATE \ --alpha-update-interval $ALPHA_UPDATE_INTERVAL \ --alpha-update-g $ALPHA_UPDATE_G \ --initial-alpha-value $INITIAL_ALPHA_VALUE \ --rate-increase-byte-count $RATE_INCREASE_BYTE_COUNT \ --hai-rate $HAI_RATE \ --rate-reduce-monitor-period $RATE_REDUCE_MONITOR_PERIOD \ --rate-increase-threshold $RATE_INCREASE_THRESHOLD \ --rate-increase-interval $RATE_INCREASE_INTERVAL \ --cnp-dscp $CNP_DSCP Done
-
- Using the nicctl command, check the DCQCN profile for each
roce-device.
-
jnpr@mi300-01:~$ sudo nicctl show dcqcn --roce-device rocep137s0 | more ROCE device : rocep137s0 DCQCN profile id : 7 Status : Disabled Rate reduce monitor period : 100 Alpha update interval : 100 Clamp target rate : 0 Rate increase threshold : 1 Rate increase byte count : 431068 Rate increase in AI phase : 200 Alpha update G value : 50 Minimum rate : 1 Token bucket size : 4000000 Rate increase interval : 10 Rate increase in HAI phase : 200 Initial alpha value : 64 DSCP value used for CNP : 48 DCQCN profile id : 5 Status : Disabled Rate reduce monitor period : 100 Alpha update interval : 100 Clamp target rate : 0 Rate increase threshold : 1 Rate increase byte count : 431068 Rate increase in AI phase : 200 Alpha update G value : 50 Minimum rate : 1 Token bucket size : 4000000 Rate increase interval : 10 Rate increase in HAI phase : 200 Initial alpha value : 64 DSCP value used for CNP : 48 DCQCN profile id : 3 Status : Disabled Rate reduce monitor period : 100 Alpha update interval : 100 Clamp target rate : 0 Rate increase threshold : 1 Rate increase byte count : 431068 Rate increase in AI phase : 200 Alpha update G value : 50 Minimum rate : 1 Token bucket size : 4000000 Rate increase interval : 10 Rate increase in HAI phase : 200 Initial alpha value : 64 DSCP value used for CNP : 48 --More—
-
- Finally run the rccl_test.sh script as below. The example below
shows the tests run for “All reduce”.
jnpr@mi300-01:/mnt/nfsshare/source/aicluster/rccl-tests$ ./run-rccl.sh Running all_reduce, channels 64, qps 1 ... Num nodes: 2 + tee --append /mnt/nfsshare/logs/rccl/MI300-RAILS-ALL/06062025_18_03_35/test.log + /opt/ompi/bin/mpirun --np 16 --allow-run-as-root -H MI300-01:8,MI300-02:8 --bind-to numa -x NCCL_IB_GID_INDEX=1 -x UCX_UNIFIED_MODE=y -x NCCL_IB_PCI_RELAXED_ORDERING=1 -x NCCL_GDR_FLUSH_DISABLE=1 -x RCCL_GDR_FLUSH_GPU_MEM_NO_RELAXED_ORDERING=0 -x PATH=/opt/ompi/bin:/opt/rocm/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin -x LD_LIBRARY_PATH=/home/dbarmann/pollara/rccl-7961624/build/release:/home/dbarmann/pollara/amd-anp-new/build:/opt/ompi/lib: -x UCX_NET_DEVICES=gpu0_eth,gpu1_eth,gpu2_eth,gpu3_eth,gpu4_eth,gpu5_eth,gpu6_eth,gpu7_eth -x NCCL_IB_HCA=rocep9s0,rocep38s0,rocep70s0,roceo1,rocep137s0,rocep166s0,rocep198s0,rocep233s0 --mca btl '^vader,openib' --mca btl_tcp_if_include mgmt_eth -x NCCL_MIN_NCHANNELS=64 -x NCCL_MAX_NCHANNELS=64 -x NCCL_IB_QPS_PER_CONNECTION=1 -x NCCL_TOPO_DUMP_FILE=/tmp/system_run2.txt -x HSA_NO_SCRATCH_RECLAIM=1 -x NCCL_GDRCOPY_ENABLE=0 -x NCCL_IB_TC=106 -x NCCL_IB_FIFO_TC=192 -x NCCL_IGNORE_CPU_AFFINITY=1 -x RCCL_LL128_FORCE_ENABLE=1 -x NCCL_PXN_DISABLE=0 -x NCCL_DEBUG=INFO -x NET_OPTIONAL_RECV_COMPLETION=1 -x NCCL_IB_USE_INLINE=1 -x NCCL_DEBUG_FILE=/mnt/nfsshare/logs/rccl/MI300-RAILS-ALL/06062025_18_03_35/nccl-debug.log -x 'LD_PRELOAD=/home/dbarmann/pollara/amd-anp-new/build/librccl-net.so /home/dbarmann/pollara/rccl-7961624/build/release/librccl.so' /mnt/nfsshare/source/aicluster/rccl-tests/build/all_reduce_perf -b 1024 -e 16G -f 2 -g 1 -n 20 -m 1 -c 1 -w 5_# nThread 1 nGpus 1 minBytes 1024 maxBytes 17179869184 step: 2(factor) warmup iters: 5 iters: 20 agg iters: 1 validation: 1 graph: 0_# rccl-tests: Version develop:b0a3841+ # Using devices # Rank 0 Group 0 Pid 18335 on mi300-01 device 0 [0000:05:00] AMD Instinct MI300X # Rank 1 Group 0 Pid 18336 on mi300-01 device 1 [0000:29:00] AMD Instinct MI300X # Rank 2 Group 0 Pid 18337 on mi300-01 device 2 [0000:49:00] AMD Instinct MI300X # Rank 3 Group 0 Pid 18340 on mi300-01 device 3 [0000:65:00] AMD Instinct MI300X # Rank 4 Group 0 Pid 18338 on mi300-01 device 4 [0000:85:00] AMD Instinct MI300X # Rank 5 Group 0 Pid 18341 on mi300-01 device 5 [0000:a9:00] AMD Instinct MI300X # Rank 6 Group 0 Pid 18342 on mi300-01 device 6 [0000:c9:00] AMD Instinct MI300X # Rank 7 Group 0 Pid 18339 on mi300-01 device 7 [0000:e5:00] AMD Instinct MI300X # Rank 8 Group 0 Pid 16249 on mi300-02 device 0 [0000:05:00] AMD Instinct MI300X # Rank 9 Group 0 Pid 16251 on mi300-02 device 1 [0000:29:00] AMD Instinct MI300X # Rank 10 Group 0 Pid 16250 on mi300-02 device 2 [0000:49:00] AMD Instinct MI300X # Rank 11 Group 0 Pid 16254 on mi300-02 device 3 [0000:65:00] AMD Instinct MI300X # Rank 12 Group 0 Pid 16255 on mi300-02 device 4 [0000:85:00] AMD Instinct MI300X # Rank 13 Group 0 Pid 16253 on mi300-02 device 5 [0000:a9:00] AMD Instinct MI300X # Rank 14 Group 0 Pid 16252 on mi300-02 device 6 [0000:c9:00] AMD Instinct MI300X # Rank 15 Group 0 Pid 16256 on mi300-02 device 7 [0000:e5:00] AMD Instinct MI300X # # out-of-place in-place # size count type redop root time algbw busbw #wrong time algbw busbw #wrong # (B) (elements) (us) (GB/s) (GB/s) (us) (GB/s) (GB/s) 1024 256 float sum -1 41.61 0.02 0.05 0 53.55 0.02 0.04 0 2048 512 float sum -1 43.79 0.05 0.09 0 50.54 0.04 0.08 0 4096 1024 float sum -1 45.75 0.09 0.17 0 45.21 0.09 0.17 0 8192 2048 float sum -1 46.50 0.18 0.33 0 47.75 0.17 0.32 0 16384 4096 float sum -1 60.52 0.27 0.51 0 48.90 0.34 0.63 0 32768 8192 float sum -1 49.68 0.66 1.24 0 52.57 0.62 1.17 0 65536 16384 float sum -1 53.75 1.22 2.29 0 52.74 1.24 2.33 0 131072 32768 float sum -1 69.16 1.90 3.55 0 56.83 2.31 4.32 0 262144 65536 float sum -1 69.31 3.78 7.09 0 63.17 4.15 7.78 0 524288 131072 float sum -1 77.16 6.79 12.74 0 80.51 6.51 12.21 0 1048576 262144 float sum -1 127.5 8.23 15.42 0 107.6 9.75 18.28 0 2097152 524288 float sum -1 125.0 16.78 31.46 0 130.9 16.02 30.04 0 4194304 1048576 float sum -1 149.5 28.06 52.61 0 148.4 28.26 52.99 0 8388608 2097152 float sum -1 222.9 37.63 70.55 0 231.6 36.21 67.90 0 16777216 4194304 float sum -1 321.3 52.21 97.90 0 326.2 51.43 96.43 0 33554432 8388608 float sum -1 436.2 76.93 144.25 0 447.0 75.06 140.75 0 67108864 16777216 float sum -1 678.9 98.85 185.35 0 684.6 98.02 183.79 0 134217728 33554432 float sum -1 1164.6 115.25 216.10 0 1148.1 116.90 219.19 0 268435456 67108864 float sum -1 1550.3 173.15 324.66 0 1563.9 171.65 321.84 0 536870912 134217728 float sum -1 2979.9 180.16 337.81 0 2977.6 180.30 338.07 0 1073741824 268435456 float sum -1 5824.8 184.34 345.64 0 5859.5 183.25 343.59 0 2147483648 536870912 float sum -1 11596 185.20 347.25 0 11611 184.94 346.77 0 4294967296 1073741824 float sum -1 520420 8.25 15.47 0 23190 185.21 347.27 0 8589934592 2147483648 float sum -1 46157 186.10 348.94 0 46150 186.13 349.00 0 17179869184 4294967296 float sum -1 568668 30.21 56.65 0 91823 187.10 350.81 0 # Errors with asterisks indicate errors that have exceeded the maximum threshold. # Out of bounds values : 0 OK # Avg bus bandwidth : 117.077 #