통합 ISSU 이해
Unified ISSU(in-service software upgrade)는 소프트웨어 업그레이드 프로세스 중 트래픽 손실을 최소화하는 기능입니다.
Unified In-Service 소프트웨어 업그레이드 시작하기
통합 ISSU(in-service software upgrade) 기능을 사용하면 컨트롤 플레인 중단 없이 트래픽 중단을 최소화하면서 서로 다른 두 개의 Junos OS 릴리스 간에 업그레이드할 수 있습니다.
필요한 정보에 빠르게 액세스하려면 표 1의 링크를 클릭하십시오.
수행해야 할 작업 |
정보 위치 |
|---|---|
디바이스에 대한 통합 ISSU 지원 확인 |
|
통합 ISSU 수행 |
|
통합 ISSU가 성공했는지 확인합니다 |
통합 ISSU는 이중 라우팅 엔진이 제공하는 중복성을 활용하며 그레이스풀 라우팅 엔진 전환 기능 및 무중단 활성 라우팅 기능과 함께 작동합니다.
통합 ISSU는 다음과 같은 이점을 제공합니다.
소프트웨어 이미지 업그레이드 중 네트워크 다운타임 제거
운영 비용을 절감하는 동시에 더 높은 서비스 수준 제공
새로운 기능의 빠른 구현 허용
통합 ISSU 프로세스 이해
이 주제는 라우터에서 발생하는 통합 ISSU 프로세스에 대해 설명합니다.
라우터에서 통합 ISSU 프로세스 이해하기
이 주제는 통합 ISSU(in-service software upgrade)를 시작할 때 이중 라우팅 엔진이 있는 라우터에서 발생하는 프로세스에 대해 설명합니다.
라우터의 통합 ISSU 프로세스
명령을 사용하면 request system software in-service-upgrade 다음 프로세스가 발생합니다.
아래 그림 1 에서 그림 6 까지:
-
실선은 라우팅 엔진과 패킷 포워딩 엔진 간의 고속 내부 링크를 나타냅니다.
-
점선은 패킷 포워딩 엔진과 라우팅 엔진의 섀시 프로세스(섀시) 간에 교환된 메시지를 나타냅니다.
-
RE0m 및 RE1b는 각각 기본 및 백업 라우팅 엔진을 나타냅니다.
-
확인 표시는 디바이스가 새 버전의 소프트웨어를 실행 중임을 나타냅니다.
통합 ISSU는 디바이스의 현재 릴리스에 앞서 최대 3개의 주요 릴리스만 업그레이드할 수 있습니다. 디바이스의 현재 릴리스보다 3개 이상의 릴리스보다 3개 빠른 릴리스로 업그레이드하려면 통합 ISSU 프로세스를 사용하여 디바이스가 대상 릴리스의 3개 주요 릴리스 내에 있을 때까지 디바이스를 하나 이상의 중간 릴리스로 업그레이드합니다.
-
기본 라우팅 엔진은 라우터 구성을 검증하여 새 소프트웨어 버전을 사용할 때 커밋이 가능한지 확인합니다.
다음에 대한 검사가 수행됩니다.
-
두 라우팅 엔진의 /var 파일 시스템에 사용할 수 있는 디스크 공간이 있습니다.
-
구성은 통합 ISSU에 의해 지원됩니다.
-
PIC는 통합 ISSU에 의해 지원됩니다.
-
Graceful 라우팅 엔진 스위치오버가 활성화됩니다.
-
- NSR(Nonstop Active Routing)이 활성화됩니다.
이러한 검사는 명령을 입력할 때 수행하는 검사와
request system software validate in-service-upgrade동일합니다. 라우팅 엔진 중 하나에서 사용 가능한 디스크 공간이 부족하면 통합 ISSU 프로세스가 실패하고 오류 메시지를 반환합니다. 그러나 지원되지 않는 PIC는 통합 ISSU를 막지 않습니다. 지원되지 않는 PIC가 있는 경우 시스템은 업그레이드 중에 이러한 PIC가 다시 시작된다는 경고를 표시합니다. 마찬가지로, 지원되지 않는 프로토콜이 구성되어 있는 경우 업그레이드 중에 지원되지 않는 프로토콜에 대해 패킷 손실이 발생할 수 있다는 경고가 표시됩니다.메모:Junos OS 릴리스 24.2R1부터 기본 라우팅 엔진은 INDB가 충돌했는지 확인하는 검사도 실행합니다. INDB 충돌이 감지되면 통합 ISSU 프로세스가 취소됩니다.
-
-
그림 1: 통합 ISSU
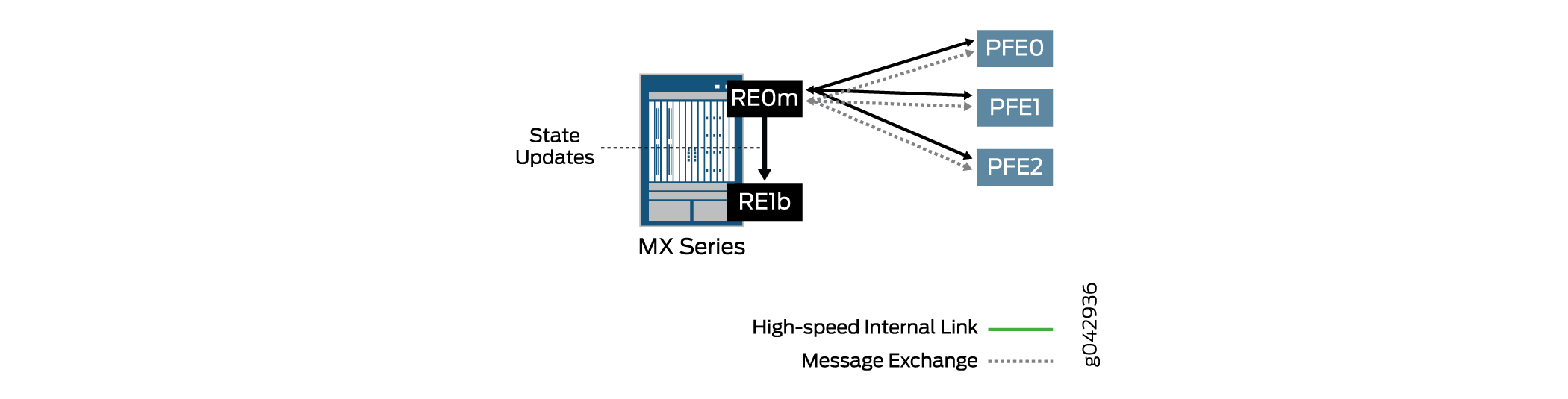 를 시작하기 전의 디바이스 상태
를 시작하기 전의 디바이스 상태
-
검증이 성공한 후, 관리 프로세스는 백업 라우팅 엔진에 새로운 소프트웨어 이미지를 설치(복사)합니다.
-
백업 라우팅 엔진이 재부팅됩니다.
-
백업 라우팅 엔진이 재부팅되고 새 소프트웨어를 실행하면 커널 상태 동기화 프로세스(ksyncd)가 기본 라우팅 엔진에서 구성 파일과 커널 상태를 동기화(복사)합니다.
그림 2: 백업 라우팅 엔진 업그레이드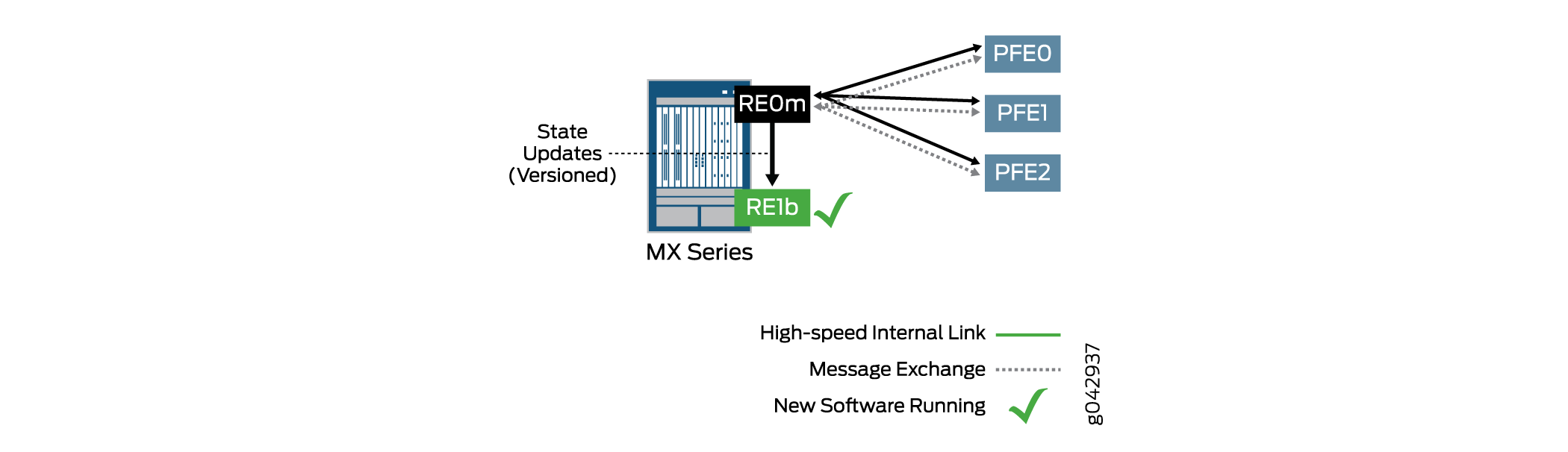 후의 디바이스 상태
후의 디바이스 상태
-
구성 파일과 커널 상태가 백업 라우팅 엔진에 동기화된 후, 기본 라우팅 엔진의 섀시 프로세스(섀시)는 통합 ISSU를 위한 다른 소프트웨어 프로세스를 준비합니다. 섀시 프로세스는 다양한 소프트웨어 프로세스(예: rpd, apsd, bfdd 등)에 통합 ISSU에 대한 정보를 제공하고 응답을 기다립니다. 모든 프로세스가 준비되면 섀시 프로세스는 라우터에 설치된 FPC에 ISSU_PREPARE 메시지를 보냅니다. 명령을 사용하여
show log messages통합 ISSU 프로세스 메시지를 표시할 수 있습니다. -
각 FPC의 패킷 포워딩 엔진은 상태를 저장하고 백업 라우팅 엔진에서 새 소프트웨어 이미지를 다운로드합니다. 그런 다음 각 패킷 포워딩 엔진 섀시 프로세스에 ISSU_READY 메시지를 보냅니다.
그림 3: 하나의 패킷 포워딩 엔진이 새 소프트웨어를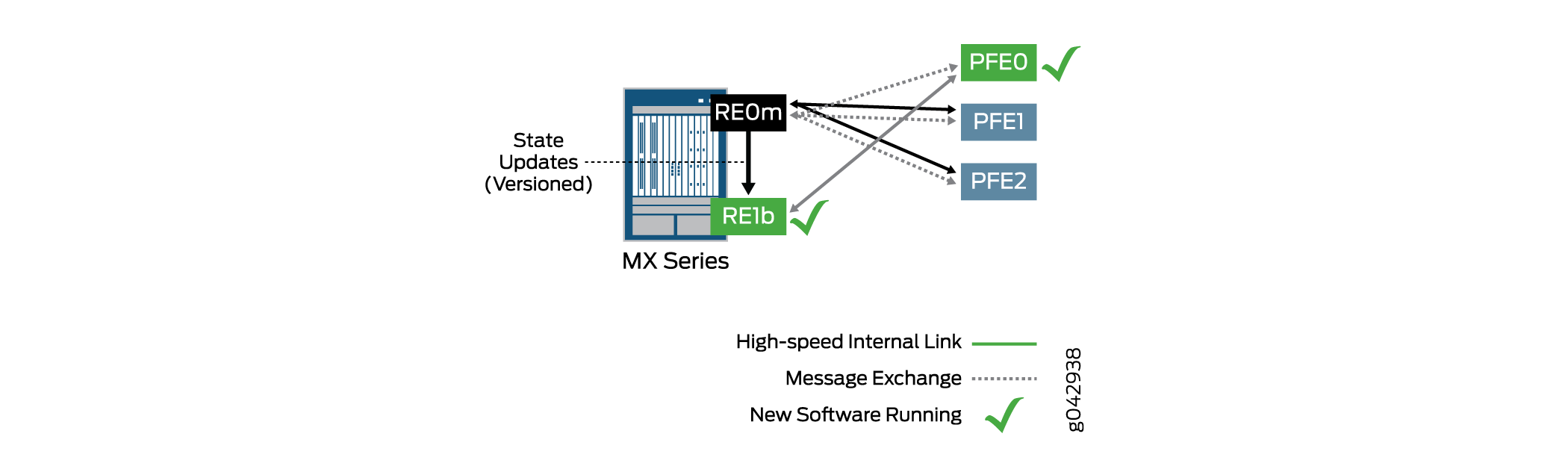 다운로드한 후의 디바이스 상태
다운로드한 후의 디바이스 상태
-
패킷 포워딩 엔진로부터 ISSU_READY 메시지를 수신한 후 섀시 프로세스는 패킷 포워딩 엔진가 상주하는 FPC에 ISSU_REBOOT 메시지를 보냅니다. FPC가 새 소프트웨어 이미지로 재부팅됩니다. FPC가 재부팅된 후 패킷 포워딩 엔진이 FPC 상태를 복원하고 새 소프트웨어를 실행하는 백업 라우팅 엔진과 고속 내부 링크가 설정됩니다. 섀시 프로세스 링크도 기본 라우팅 엔진으로 재설정됩니다.
메모:통합 ISSU 중에 발생하는 패킷 포워딩 엔진 재부팅을 "다크 윈도우"라고 합니다. 이 다운타임 기간 동안 최대 2초의 트래픽 손실이 발생할 수 있습니다.
-
모든 패킷 전달 엔진이 기본 라우팅 엔진의 섀시 프로세스를 사용하여 READY 메시지를 보낸 이후에는 다른 소프트웨어 프로세스가 라우팅 엔진 전환을 위해 준비됩니다. 이 시점에서 시스템은 전환할 준비가 되었습니다.
그림 4: 라우팅 엔진 전환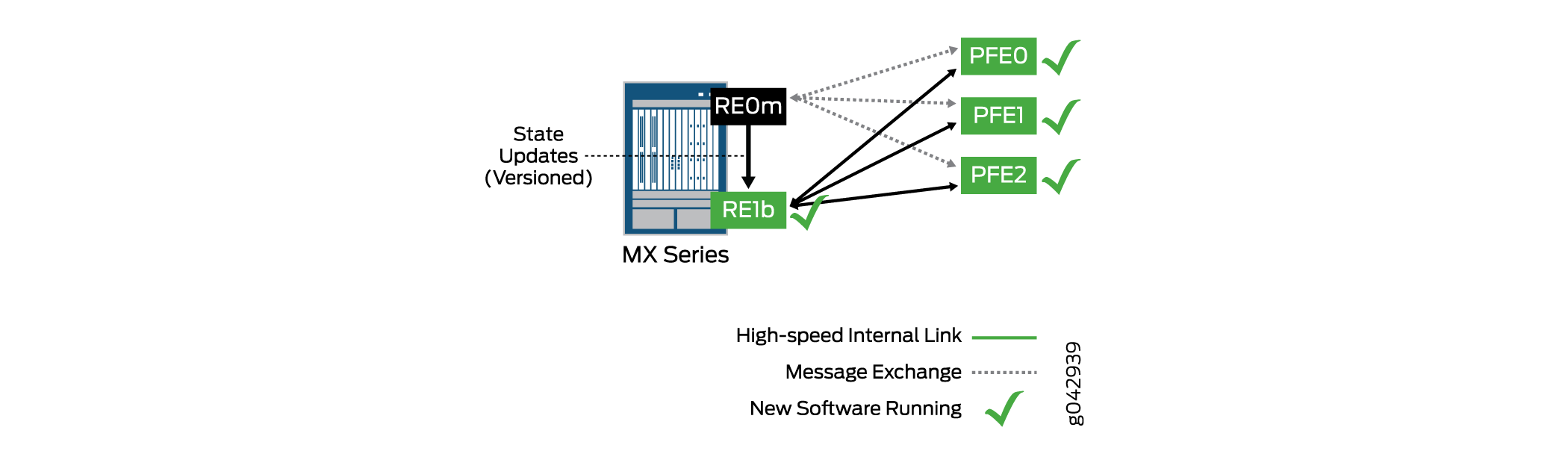 전의 디바이스 상태
전의 디바이스 상태
-
라우팅 엔진 전환이 발생하고 백업이었던 라우팅 엔진(re1)이 이제 기본 라우팅 엔진이 됩니다.
그림 5: 라우팅 엔진 전환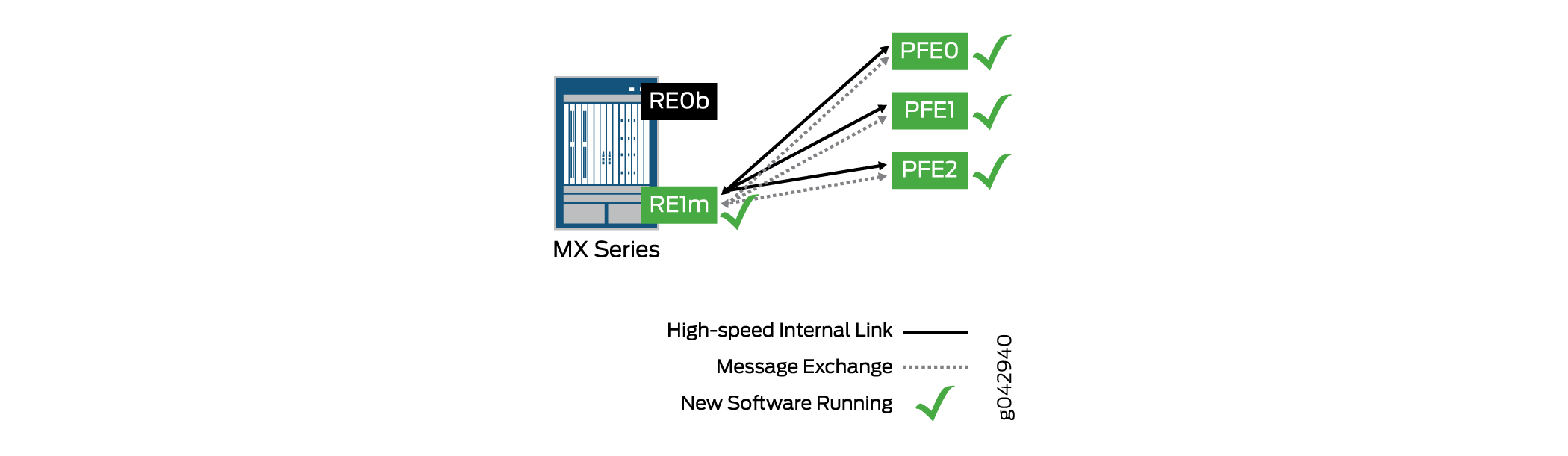 후의 디바이스 상태
후의 디바이스 상태
-
이제 새로운 백업 라우팅 엔진이 새로운 소프트웨어 이미지로 업그레이드되었습니다. (명령에서
request system software in-service-upgrade옵션을 지정한no-old-master-upgrade경우 이 단계를 건너뜁니다.)그림 6: 통합 ISSU가 완료된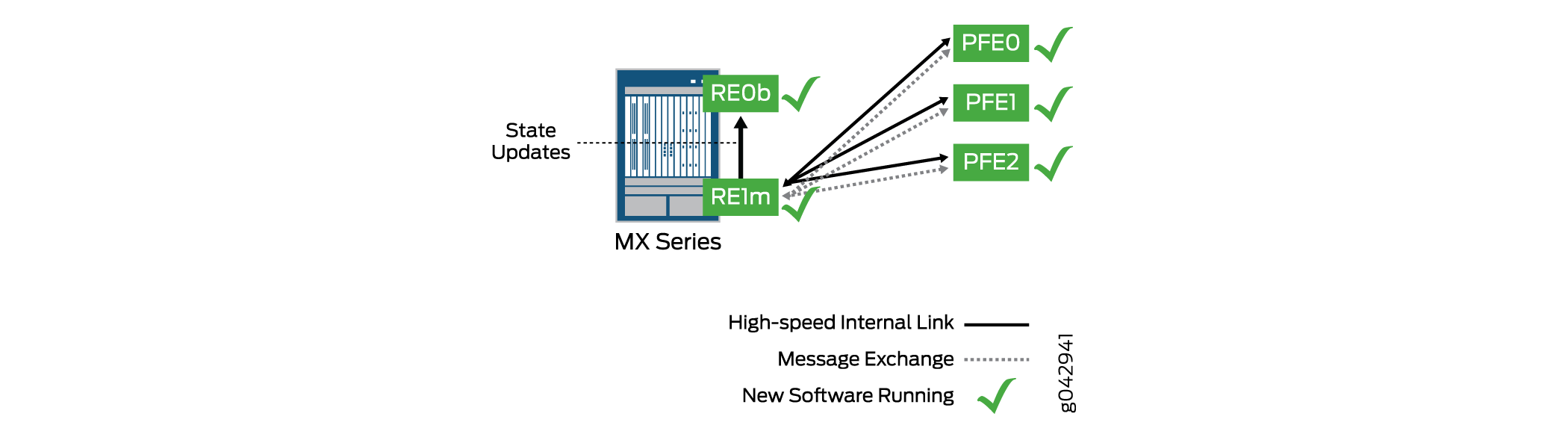 후의 디바이스 상태
후의 디바이스 상태
-
백업 라우팅 엔진이 성공적으로 업그레이드되면, 통합 ISSU가 완료됩니다.
TX Matrix 라우터에서 통합 ISSU 프로세스 이해하기
이 주제는 통합 ISSU(in-service software upgrade)를 시작할 때 TX Matrix 라우터에서 발생하는 프로세스를 설명합니다.
TX Matrix 라우터의 통합 ISSU 프로세스
이 섹션에서는 TX Matrix 라우터와 연결된 회선 카드 섀시(LCC) 역할을 하는 라우터에서 발생하는 프로세스에 대해 설명합니다.
라우팅 매트릭스는 TX Matrix 라우터와 1개에서 4개까지의 T640 라우터로 구성된 다중 섀시 아키텍처입니다. 사용자 인터페이스의 관점에서 라우팅 매트릭스는 단일 라우터로 나타납니다. TX Matrix 라우터는 라우팅 매트릭스의 모든 T640 라우터를 제어합니다.
각 라우터에는 이중 라우팅 엔진이 있습니다.
TX Matrix 라우터에서 No link title 명령을 사용하면 다음과 같은 프로세스가 발생합니다.
TX Matrix 라우터(글로벌 기본)의 기본 라우팅 엔진에서 관리 프로세스(mgd)는 현재 구성을 확인합니다.
다음에 대한 검사가 수행됩니다.
디스크 공간은 모든 라우팅 엔진의 /var 파일 시스템에 사용할 수 있습니다.
구성은 통합 ISSU에 의해 지원됩니다.
PIC는 통합 ISSU에 의해 지원됩니다.
Graceful 라우팅 엔진 스위치오버가 활성화됩니다.
- NSR(Nonstop Active Routing)이 활성화됩니다.
구성을 성공적으로 검증한 후, 관리 프로세스는 TX Matrix 라우터 및 T640 라우터의 백업 라우팅 엔진에 새 이미지를 복사합니다.
백업 라우팅 엔진의 커널 동기화 프로세스(ksyncd)는 백업 라우팅 엔진의 커널을 기본 라우팅 엔진의 커널과 동기화합니다.
글로벌 백업 라우팅 엔진이 새로운 소프트웨어로 업그레이드되었습니다. 다음으로 글로벌 백업 라우팅 엔진이 재부팅됩니다. 그런 다음 글로벌 백업 라우팅 엔진은 글로벌 기본 라우팅 엔진의 구성 및 커널 상태를 동기화합니다.
회선 카드 섀시(LCC) 백업 라우팅 엔진이 업그레이드되고 재부팅됩니다. 그런 다음 회선 카드 섀시(LCC) 백업 라우팅 엔진이 업그레이드된 글로벌 백업 라우팅 엔진과 연결하고 구성과 커널 상태를 동기화합니다.
통합 ISSU 제어가 관리 프로세스에서 섀시 프로세스(섀시)로 이동합니다. 섀시 프로세스는 다양한 소프트웨어 프로세스(예: rpd, apsd, bfdd 등)에 통합 ISSU에 대한 정보를 제공하고 응답을 기다립니다.
프로세스가 통합 ISSU를 위한 준비가 되었음을 알리는 소프트웨어 프로세스로부터 메시지를 수신한 후, 글로벌 기본 라우팅 엔진의 섀시 프로세스는 라우팅 노드의 섀시 프로세스로 메시지를 보내 통합 ISSU를 시작합니다.
라우팅 노드의 섀시 프로세스는 FPC와 지능형 PIC와 같은 현장 교체 가능 유닛(FRU)에 ISSU_PREPARE 메시지를 보냅니다.
ISSU_PREPARE 메시지를 수신한 후 패킷 전달 엔진은 현재 상태 정보를 저장하고 백업 라우팅 엔진에서 새 소프트웨어 이미지를 다운로드합니다. 그런 다음 각 패킷 포워딩 엔진 섀시 프로세스에 ISSU_READY 메시지를 보냅니다. 명령을 사용하여
show log messages통합 ISSU 프로세스 메시지를 표시할 수 있습니다.패킷 전달 엔진에서 ISSU_READY 메시지를 수신한 후 섀시 프로세스는 FRU에 ISSU_REBOOT 메시지를 보냅니다. 업그레이드가 진행되는 동안 FRU는 라우팅 노드의 섀시 프로세스로 ISSU_IN_PROGRESS 메시지를 계속 보냅니다. 각 라우팅 노드의 섀시 프로세스는 차례로 글로벌 기본 라우팅 엔진의 섀시 프로세스로 ISSU_IN_PROGRESS 메시지를 보냅니다.
메모:통합 ISSU 중에 발생하는 패킷 포워딩 엔진 재부팅은 매우 짧은 다운타임을 갖도록 설계되었습니다.
통합 ISSU 재부팅 후 패킷 전달 엔진은 저장된 상태 정보를 복원하고 라우팅 노드에 다시 연결합니다. 각 라우팅 노드의 섀시 프로세스는 글로벌 기본 라우팅 엔진의 섀시 프로세스로 ISSU_READY 메시지를 보냅니다. 라우팅 노드의 섀시 프로세스에서 CM_MSG_READY 메시지는 통합 ISSU가 FRU에서 완료되었음을 나타냅니다.
통합 ISSU 제어는 글로벌 기본 라우팅 엔진의 관리 프로세스로 되돌아갑니다.
관리 프로세스는 기본 라우팅 엔진에서 라우팅 엔진 전환을 시작합니다.
라우팅 엔진 스위치오버는 TX Matrix 라우터 및 T640 라우터에서 발생합니다.
전환 후 FRU는 새로운 기본 라우팅 엔진에 연결됩니다. 그런 다음 T640 라우터 FRU의 섀시 관리자와 패킷 포워딩 엔진 관리자가 T640 라우터의 새로운 기본 라우팅 엔진에 연결됩니다.
글로벌 기본 라우팅 엔진의 관리 프로세스는 T640 라우터의 이전 기본 라우팅 엔진에서 업그레이드 프로세스를 시작합니다. (명령에서
request system software in-service-upgrade옵션을 지정한no-old-master-upgrade경우 이 단계를 건너뜁니다.)이전에 T640 라우터의 프라이머리였던 라우팅 엔진이 업그레이드된 후, 관리 프로세스는 이전에 TX Matrix 라우터의 글로벌 기본이었던 라우팅 엔진의 업그레이드를 시작합니다.
통합 ISSU가 성공적으로 완료된 후, 명령에서 옵션을 지정한
reboot경우 TX Matrix 라우터 및 T640 라우터가request system software in-service-upgrade재부팅됩니다.
ISSU(In-Service Software Upgrade) 이해
ISSU(In-Service Software Upgrade)를 사용하면 컨트롤 플레인의 중단을 최소화하고 트래픽 중단을 최소화하면서 서로 다른 두 개의 Junos OS 릴리스 간에 업그레이드할 수 있습니다. ISSU 중에 Junos OS는 두 개의 별도 가상 머신(VM)에서 실행됩니다. 한 VM은 기본 라우팅 엔진 역할을 하는 기본 역할에 있고 다른 VM은 백업 라우팅 엔진 역할을 하는 백업 역할에 있습니다. Junos OS가 백업 VM에서 업그레이드됩니다. 소프트웨어 업그레이드에 성공하면 백업 VM이 기본 VM이 되고 원래 기본 VM은 더 이상 필요하지 않으며 종료됩니다.
ISSU는 다음과 같은 이점을 제공합니다.
소프트웨어 이미지 업그레이드 중 네트워크 다운타임 제거
운영 비용을 절감하는 동시에 더 높은 서비스 수준 제공
새로운 기능의 빠른 구현 허용
서비스 중인 소프트웨어 업그레이드 프로세스
독립형 디바이스에서 ISSU를 요청하는 경우:
관리 프로세스(mgd)는 NSR(Non-Stop Routing), GRES(Graceful 라우팅 엔진 Switchover), NSB(Non-Stop Bridging)가 활성화되어 있는지 확인합니다.
스위치는 소프트웨어 패키지를 다운로드하고 검증합니다.
ISSU 상태 시스템은 최신 소프트웨어를 사용하여 백업 라우팅 엔진(RE)을 생성합니다.
ISSU 상태 시스템은 백업 RE가 모든 데이터를 기본 RE와 동기화했는지 확인합니다.
ISSU 상태 머신은 디바이스(예: 포워딩 ASIC, FPGA, 관리 포트 및 시리얼 콘솔)를 기본 RE에서 백업 RE로 이동합니다.
기본 역할은 RE 간에 전환되므로 백업 RE가 기본 RE가 됩니다.
이전의 기본 RE는 종료됩니다.
ACX5000 시리즈 라우터의 ISSU(In-Service Software Upgrade) 이해
ISSU(In-Service Software Upgrade)를 사용하면 컨트롤 플레인의 중단을 최소화하고 트래픽 중단을 최소화하면서 서로 다른 두 개의 Junos OS 릴리스 간에 업그레이드할 수 있습니다. ISSU 중에 Junos OS는 두 개의 별도 가상 머신(VM)에서 실행됩니다. 한 VM은 기본 라우팅 엔진 역할을 하는 기본 역할에 있고 다른 VM은 백업 라우팅 엔진 역할을 하는 백업 역할에 있습니다. Junos OS가 백업 VM에서 업그레이드됩니다. 소프트웨어 업그레이드에 성공하면 백업 VM이 기본 VM이 되고 원래 기본 VM은 더 이상 필요하지 않으며 종료됩니다.
ISSU는 ACX5000 시리즈 라우터의 Junos OS 릴리스 15.1X54–D60 이상에서 지원됩니다.
ISSU는 다음과 같은 이점을 제공합니다.
소프트웨어 이미지 업그레이드 중 네트워크 다운타임 제거
운영 비용을 절감하는 동시에 더 높은 서비스 수준 제공
새로운 기능의 빠른 구현 허용
서비스 중인 소프트웨어 업그레이드 프로세스
독립형 디바이스에서 ISSU를 요청하는 경우:
관리 프로세스(mgd)는 NSR(Non-Stop Routing), GRES(Graceful 라우팅 엔진 Switchover), NSB(Non-Stop Bridging)가 활성화되어 있는지 확인합니다.
라우터가 소프트웨어 패키지를 다운로드하고 검증합니다.
ISSU 상태 시스템은 최신 소프트웨어를 사용하여 백업 라우팅 엔진(RE)을 생성합니다.
ISSU 상태 시스템은 백업 RE가 모든 데이터를 기본 RE와 동기화했는지 확인합니다.
ISSU 상태 머신은 디바이스(예: 포워딩 ASIC, FPGA, 관리 포트 및 시리얼 콘솔)를 기본 RE에서 백업 RE로 이동합니다.
기본 역할은 RE 간에 전환되므로 백업 RE가 기본 RE가 됩니다.
이전의 기본 RE는 종료됩니다.