このページの内容
CSDS向けJNUトポロジー
JNUトポロジーとConnected Security Distributed Services(CSDS)アーキテクチャのノードについて学習します。
Junos Node Unifier(JNU)は、Connected Security Distributed Services(CSDS)アーキテクチャでネットワークデバイスを管理するシングルタッチポイント管理ソリューションです。このソリューションは、Junos OSを実行するネットワークデバイスを一元的に設定できる単一のポイントを提供します。
JNUノード
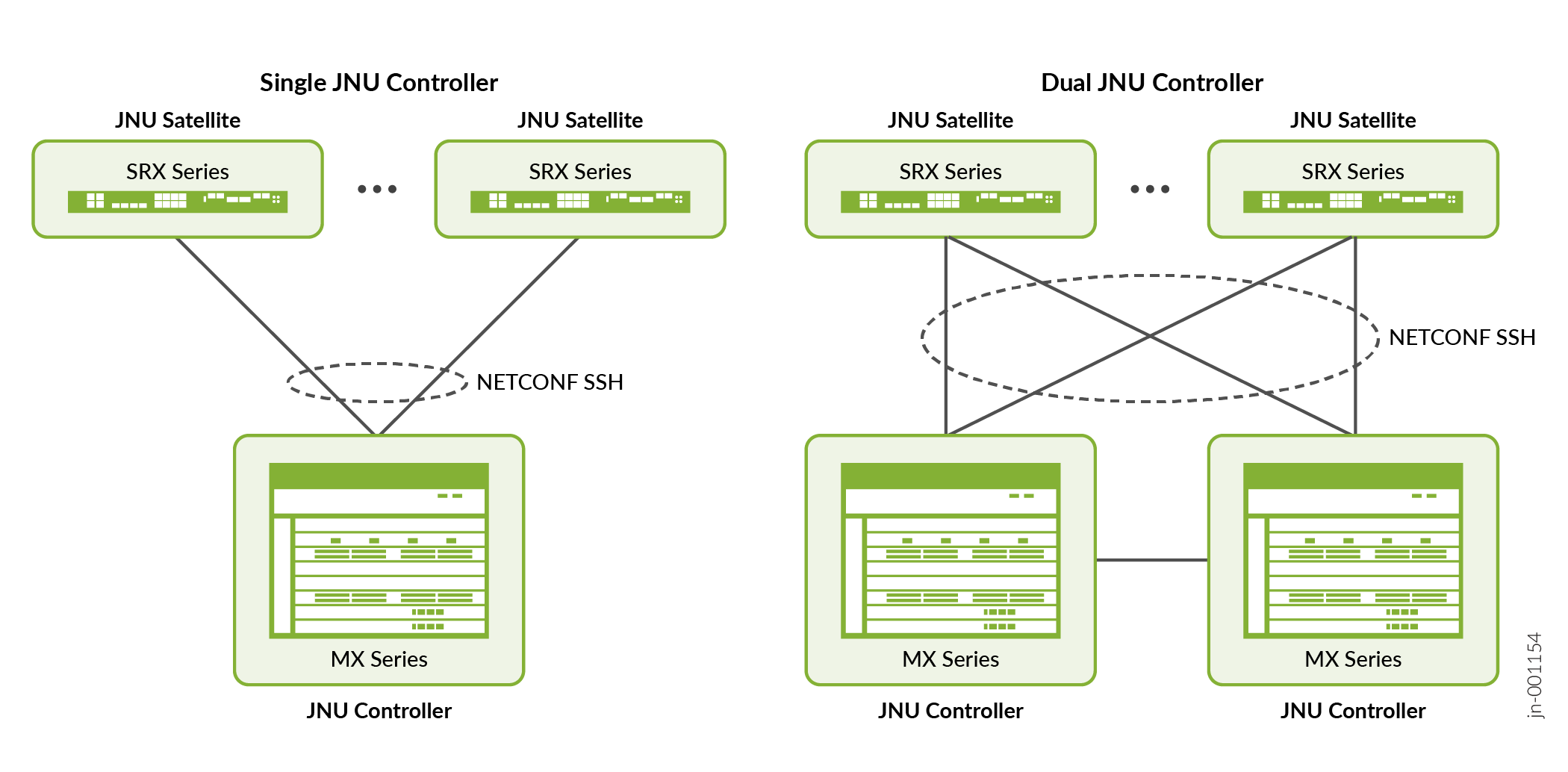
図 1 は、JNU トポロジーとそのコンポーネントを示しています。
-
JNUコントローラ—CSDSトポロジー内のJNUサテライトなど、複数のネットワークデバイスの統合されたCLIビューを表示する一元化されたエンティティ。このノードは、 jnud プロセスをコントローラモードで実行します。JNUトポロジーは、シングルコントローラの設定に加えて、デュアルコントローラの設定もサポートしており、アクティブ/アクティブの高可用性を提供します。
-
JNUサテライト—JNUサテライトは、JNUコントローラの制御下で動作する物理または仮想ネットワークデバイスです。各ノードは、 jnud プロセスをサテライトモードで実行します。
JNUノード間の接続は、CSDS管理ネットワークを使用して確立されるため、別のネットワークは必要ありません。JNUの設定中に、デバイスはjnuadminユーザー資格情報を作成します。コントローラとサテライトは、これらの認証情報を使用して通信します。通信チャネルは、SSH接続を介したセキュアなNETCONFです。コントローラは、各サテライトのデバイス管理スキーマを学習します。デバイス管理スキーマは、ネットワークデバイスに固有の一意のデータモデルです。デバイスの完全な構成と運用機能について説明します。JNUを設定した後、コントローラからすべてのサテライトのスキーマにアクセスし、コントローラからノードを一元的に管理できます。
JNUトポロジーの考慮事項
CSDSアーキテクチャなどのマルチノード設定では、次のようになります。
-
JNUDプロセスを実行するMXシリーズルーターは、JNUコントローラとして機能します。シングルコントローラーまたはデュアルコントローラーによるシングルタッチポイント管理ソリューションをサポートします。
-
JNUDプロセスを実行するSRXシリーズファイアウォール、vSRX仮想ファイアウォール(vSRX)、およびJunosデバイスマネージャー(JDM)は、JNUサテライトとして機能します。
-
JDMおよびvSRXインスタンスをホストする外部Ubuntuサーバーは、JNUトポロジーの一部ではありません。
-
コントローラノードとサテライトノードで同じJunos OSリリースを実行する必要があります。
JNU導入プロセス
以下の手順では、JNUの導入プロセスを説明します。
MXシリーズルーターをコントローラとして設定します。両方のルーティングエンジンでコントローラロールを設定する必要があることに注意してください。
SRXシリーズファイアウォール、vSRX仮想ファイアウォール、JDMコンテナをサテライトとして設定します。
衛星がコントローラに加わると、
サテライトは、初期同期時にスキーマをコントローラにプッシュします。コントローラは、初期同期の一環として、サテライトのバージョンとモデルも学習します。サテライトがコントローラーと同期するのに30分の猶予があり、30秒間隔で60回の試行が行われます。同期に失敗した場合は、サテライトでコマンド
request jnu satellite syncを実行して、手動で初期同期を実行できます。操作コマンド
show chassis jnu satellitesの出力には、JDM を含むコントローラーによって管理されているすべてのサテライトが一覧表示されます。JDMをサテライトとして追加しますが、他のサテライトとは異なり、JDMは初期同期時にその設定をコントローラに送信しません。ただし、コントローラを使用してJDM固有の操作コマンドを実行することはできます。コントローラにはデュアルルーティングエンジンが搭載されているため、コントローラはもう一方のルーティングエンジンをスキーマの詳細と同期します。
デュアルコントローラ設定では、サテライトは両方のコントローラと初期同期を実行します。サテライトは、
[edit chassis jnu-management other-controller controller-ip-address]階層レベルからコントローラのIPアドレスを取得し、スキーマを両方のコントローラに送信します。もう一方のコントローラーが到達できない場合、コミットは失敗します。コントローラは、サテライトのコマンド階層を独自のコマンド階層とマージしますが、サテライトの設定スキーマは除外されます。コントローラとサテライトは、設定スキーマを別々に維持します。
コントローラは、各サテライトで実行されているスキーマの異なるバージョンを動的に学習します。
注:サテライトは、コントローラにコミットされていない変更を残さずにコントローラに参加する必要があります。サテライトの参加およびアップグレードプロセス中に設定コマンドを実行しないでください。設定コマンドを実行する前に、運用コマンド
show chassis jnu satellitesを使用してサテライトのステータスを確認してください。サテライトの設定がコントローラからのコミットによって上書きされる可能性があるため、サテライトがJNUトポロジーに加わった後、サテライト上で直接コマンドを実行しないようにしてください。
コントローラからサテライトの設定のXMLサブツリーフィルタリングを実行することはできません。
- コントローラは、サテライトの後続の管理を行います。コントローラでは、サテライトとして追加されたネットワークデバイスに固有のJunos OSコマンドを実行できます。