Comprendre l’ISSU unifié
La mise à niveau logicielle en service unifié (ISSU) est une fonctionnalité qui minimise les pertes de trafic pendant le processus de mise à niveau logicielle.
Premiers pas avec la mise à niveau logicielle unifiée en service
La fonctionnalité ISSU (Unified In-Service Software Upgrade) vous permet d’effectuer une mise à niveau entre deux versions différentes de Junos OS sans interruption sur le plan de contrôle et avec un minimum d’interruption du trafic.
Pour accéder rapidement à l’information dont vous avez besoin, cliquez sur le lien dans le tableau 1.
Tâche que vous devez effectuer |
Où se trouvent les informations |
|---|---|
Vérifier la prise en charge unifiée de l’ISSU pour votre appareil |
|
Réaliser un ISSU unifié |
|
Vérifier que l’ISSU unifié est réussi |
L’ISSU unifié tire parti de la redondance offerte par les deux moteurs de routage et fonctionne conjointement avec la fonctionnalité de basculement du moteur de routage et la fonction de routage actif ininterrompu.
Unified ISSU offre les avantages suivants :
Élimine les temps d’arrêt du réseau lors de la mise à niveau des images logicielles
Réduit les coûts d’exploitation tout en offrant des niveaux de service plus élevés
Permet une mise en œuvre rapide de nouvelles fonctionnalités
Comprendre le processus ISSU unifié
Cette rubrique explique les processus ISSU unifiés qui ont lieu sur un routeur.
- Comprendre le processus ISSU unifié sur un routeur
- Comprendre le processus ISSU unifié sur le routeur à matrice TX
Comprendre le processus ISSU unifié sur un routeur
Cette rubrique décrit les processus qui se produisent sur un routeur doté de deux moteurs de routage lorsque vous lancez une mise à niveau logicielle en service unifié (ISSU).
Processus ISSU unifié sur un routeur
Après avoir utilisé la request system software in-service-upgrade commande, le processus suivant se produit.
De la figure 1 à la figure 6 ci-dessous :
-
Une ligne continue indique la liaison interne à haut débit entre un moteur de routage et un moteur de transfert de paquets.
-
Une ligne pointillée indique les messages échangés entre le moteur de transfert de paquets et le processus de châssis (chassisd) sur le moteur de routage.
-
RE0m et RE1b indiquent respectivement les moteurs de routage principal et secondaire.
-
La coche indique que l’appareil exécute la nouvelle version du logiciel.
Unified ISSU ne peut mettre à niveau que trois versions majeures avant la version actuelle sur un appareil. Pour effectuer une mise à niveau vers une version plus de trois versions antérieure à la version actuelle sur un appareil, utilisez le processus ISSU unifié pour mettre à niveau l’appareil vers une ou plusieurs versions intermédiaires jusqu’à ce que l’appareil se trouve dans les trois versions majeures de la version cible.
-
Le moteur de routage principal valide la configuration du routeur pour s’assurer qu’elle peut être validée lorsque vous utilisez la nouvelle version du logiciel.
Des contrôles sont effectués pour les éléments suivants :
-
L’espace disque est disponible pour le système de fichiers /var sur les deux moteurs de routage.
-
La configuration est prise en charge par un ISSU unifié.
-
Les PIC sont soutenus par une ISSU unifiée.
-
Le basculement du moteur de routage intelligent est activé.
-
Le routage actif ininterrompu est activé.
Ces vérifications sont les mêmes que celles effectuées lors de la saisie de la
request system software validate in-service-upgradecommande. Si l’espace disque disponible sur l’un ou l’autre des moteurs de routage est insuffisant, le processus ISSU unifié échoue et renvoie un message d’erreur. Toutefois, les PIC non pris en charge n’empêchent pas l’ISSU unifié. S’il existe des PIC non pris en charge, le système émet un avertissement pour indiquer que ces PIC redémarreront pendant la mise à niveau. De même, si un protocole non pris en charge est configuré, le système émet un avertissement indiquant que des pertes de paquets peuvent se produire pour le protocole non pris en charge pendant la mise à niveau.Note:À partir de Junos OS version 24.2R1, le moteur de routage principal exécutera également une vérification pour voir si l’INDB a planté. Si un plantage de la base de données INDB est détecté, le processus ISSU unifié sera annulé.
-
-
Figure 1 : État de l’équipement avant le démarrage d’un ISSU
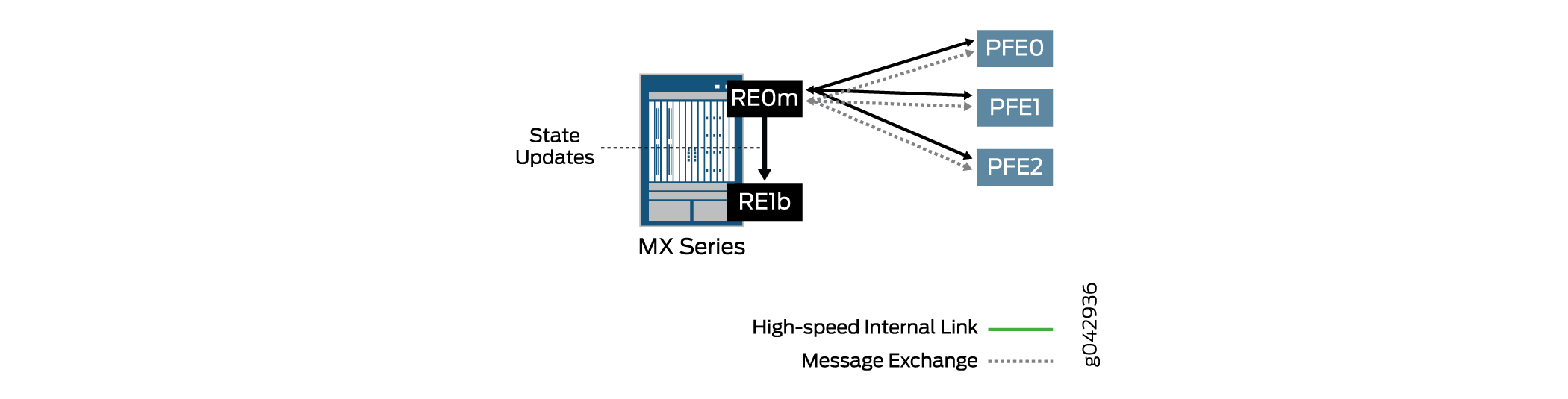 unifié
unifié
-
Une fois la validation réussie, le processus de gestion installe (copie) la nouvelle image logicielle dans le moteur de routage de sauvegarde.
-
Le moteur de routage de sauvegarde est redémarré.
-
Une fois que le moteur de routage de sauvegarde est redémarré et qu’il exécute le nouveau logiciel, le processus de synchronisation de l’état du noyau (ksyncd) synchronise (copie) le fichier de configuration et l’état du noyau à partir du moteur de routage principal.
Figure 2 : état de l’équipement après la mise à niveau du moteur de routage de secours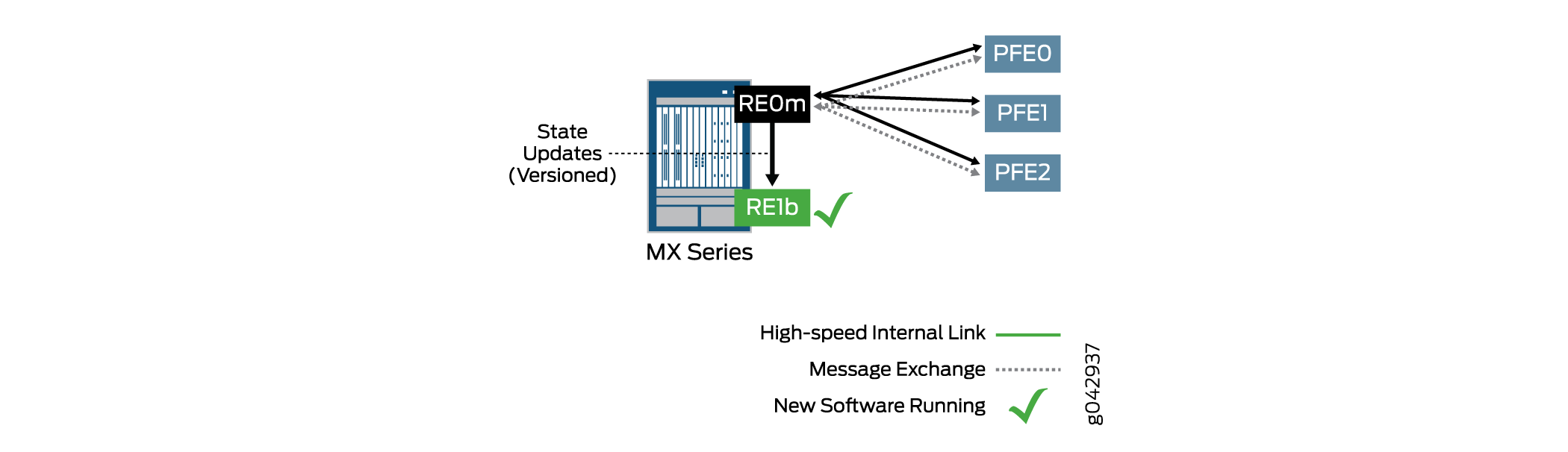
-
Une fois que le fichier de configuration et l’état du noyau sont synchronisés avec le moteur de routage de sauvegarde, le processus de châssis (chassisd) du moteur de routage principal prépare d’autres processus logiciels pour l’ISSU unifié. Le processus de châssis informe les différents processus logiciels (tels que rpd, apsd, bfdd, etc.) de l’ISSU unifié et attend les réponses de leur part. Lorsque tous les processus sont prêts, le processus de châssis envoie un message ISSU_PREPARE aux FPC installés dans le routeur. Vous pouvez afficher les messages de processus ISSU unifiés à l’aide de la
show log messagescommande. -
Le moteur de transfert de paquets de chaque FPC enregistre son état et télécharge la nouvelle image logicielle à partir du moteur de routage de sauvegarde. Ensuite, chaque moteur de transfert de paquets envoie un message ISSU_READY au processus de châssis.
Figure 3 : État de l’équipement après le téléchargement du nouveau logiciel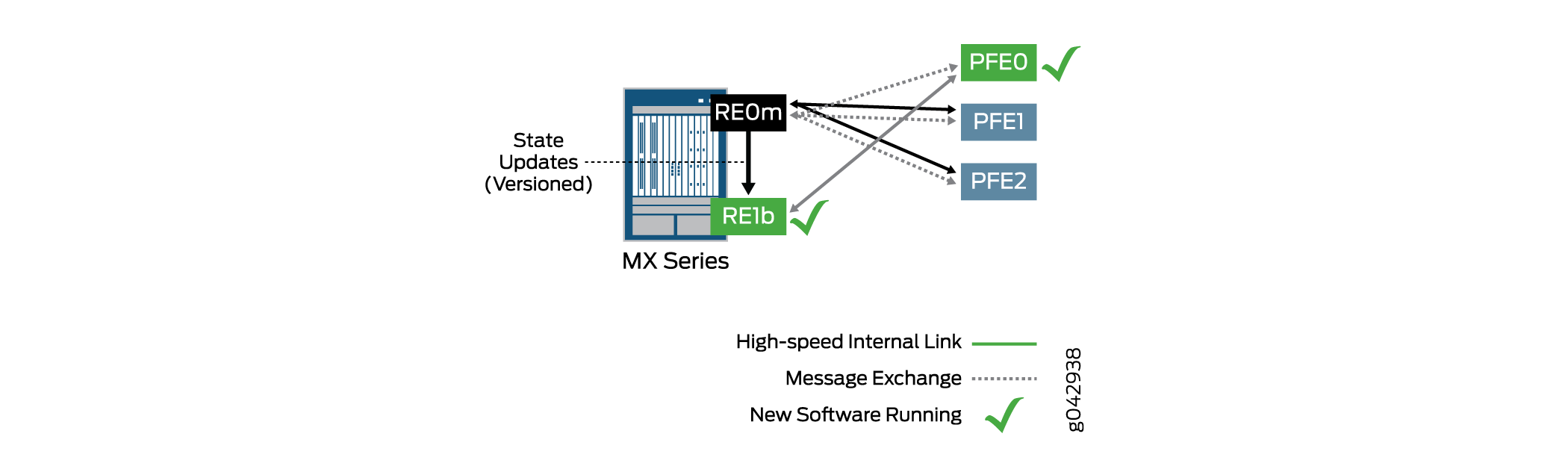 par un moteur de transfert de paquets
par un moteur de transfert de paquets
-
Après réception d’un message ISSU_READY d’un moteur de transfert de paquets, le processus de châssis envoie un message ISSU_REBOOT au FPC sur lequel réside le moteur de transfert de paquets. Le FPC redémarre avec la nouvelle image logicielle. Une fois le FPC redémarré, le moteur de transfert de paquets restaure l’état du FPC et une liaison interne haut débit est établie avec le moteur de routage de secours exécutant le nouveau logiciel. La liaison de processus de châssis est également rétablie avec le moteur de routage principal.
Note:Les redémarrages du moteur de transfert de paquets qui se produisent au cours d’un ISSU unifié sont connus sous le nom de « fenêtre noire ». Vous pouvez vous attendre à voir jusqu’à 2 secondes de perte de trafic pendant cette fenêtre d’indisponibilité.
-
Une fois que tous les moteurs de transfert de paquets ont envoyé un message READY à l’aide du processus de châssis du moteur de routage principal, d’autres processus logiciels sont préparés pour un basculement du moteur de routage. À ce stade, le système est prêt pour un basculement.
Figure 4 : État de l’équipement avant le basculement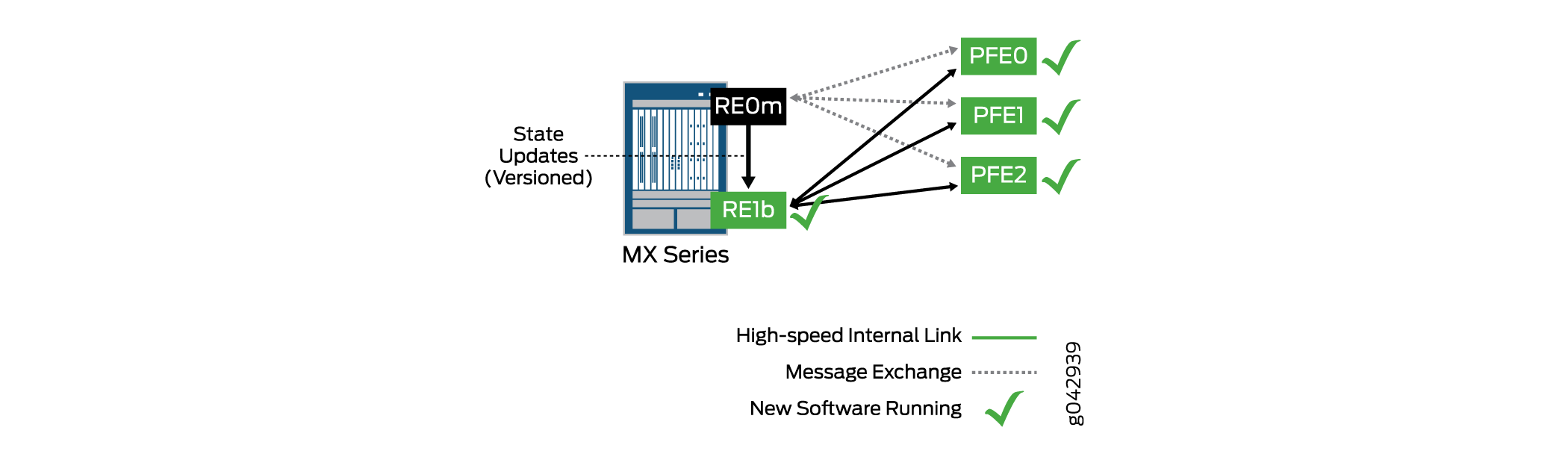 du moteur de routage
du moteur de routage
-
Le basculement du moteur de routage se produit et le moteur de routage (re1) qui était la sauvegarde devient maintenant le moteur de routage principal.
Figure 5 : État de l’équipement après le basculement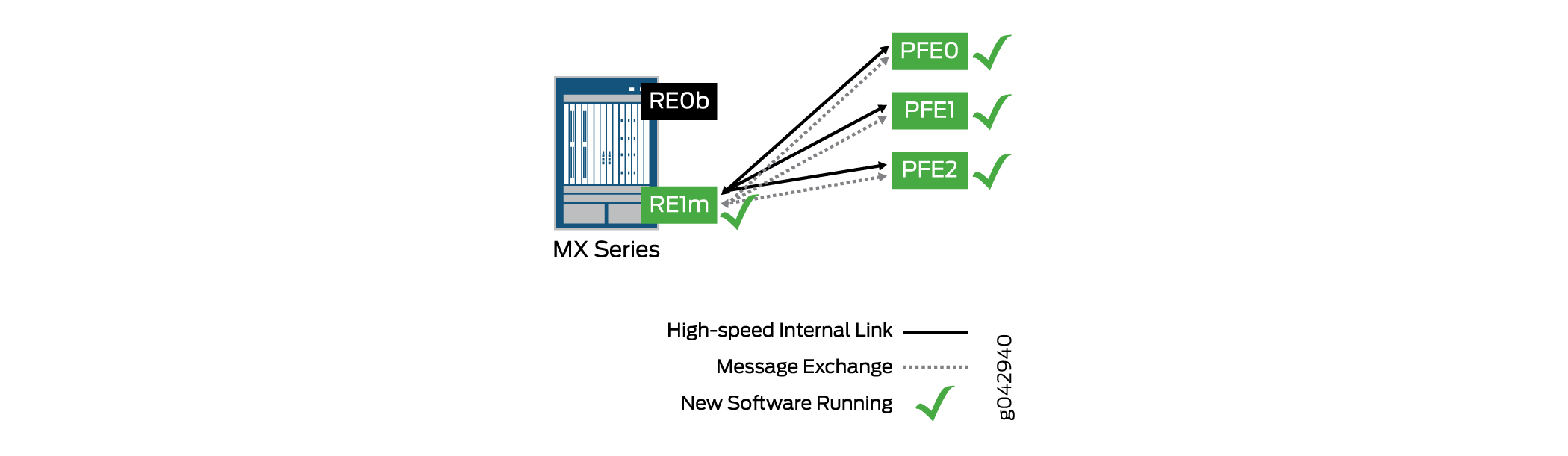 du moteur de routage
du moteur de routage
-
Le nouveau moteur de routage de sauvegarde est maintenant mis à niveau vers la nouvelle image logicielle. (Cette étape est ignorée si vous avez spécifié l’option
no-old-master-upgradedans larequest system software in-service-upgradecommande.)Figure 6 : État de l’appareil une fois l’ISSU unifié terminé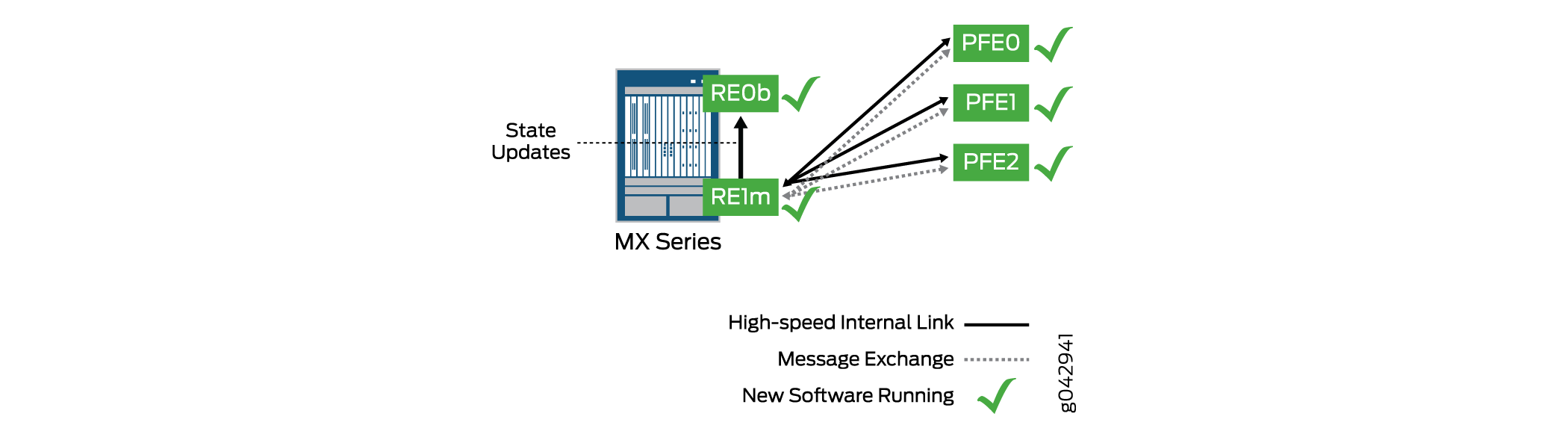
-
Lorsque le moteur de routage de sauvegarde a été correctement mis à niveau, l’ISSU unifié est terminé.
Comprendre le processus ISSU unifié sur le routeur à matrice TX
Cette rubrique décrit les processus qui se produisent sur un routeur TX Matrix lorsque vous lancez une mise à niveau logicielle en service unifié (ISSU).
Processus ISSU unifié sur le routeur à matrice TX
Cette section décrit les processus qui se déroulent sur un routeur TX Matrix et les routeurs agissant en tant que châssis de carte de ligne (LCC) connectés.
Une matrice de routage est une architecture multichâssis qui se compose d’un routeur à matrice TX et d’un à quatre routeurs T640. Du point de vue de l’interface utilisateur, la matrice de routage apparaît comme un routeur unique. Le routeur TX Matrix contrôle tous les routeurs T640 de la matrice de routage.
Chaque routeur dispose de deux moteurs de routage.
Une fois que vous avez utilisé la commande Aucun titre de lien sur un routeur TX Matrix, le processus suivant se produit :
Le processus de gestion (mgd) sur le moteur de routage principal du routeur TX Matrix (principal global) vérifie la configuration actuelle.
Des contrôles sont effectués pour les éléments suivants :
L’espace disque est disponible pour le système de fichiers /var sur tous les moteurs de routage.
La configuration est prise en charge par un ISSU unifié.
Les PIC sont soutenus par une ISSU unifiée.
Le basculement du moteur de routage intelligent est activé.
Le routage actif ininterrompu est activé.
Une fois la configuration validée, le processus de gestion copie la nouvelle image dans les moteurs de routage de sauvegarde du routeur TX Matrix et des routeurs T640.
Le processus de synchronisation du noyau (ksyncd) sur les moteurs de routage de sauvegarde synchronise les noyaux des moteurs de routage de sauvegarde avec les noyaux des moteurs de routage principaux.
Le moteur de routage de sauvegarde global est mis à niveau avec le nouveau logiciel. Ensuite, le moteur de routage de sauvegarde global est redémarré. Ensuite, le moteur de routage de sauvegarde global synchronise la configuration et l’état du noyau à partir du moteur de routage principal global.
Les moteurs de routage de secours LCC sont mis à niveau et redémarrés. Ensuite, les moteurs de routage de sauvegarde LCC se connectent au moteur de routage de sauvegarde global mis à niveau et synchronisent la configuration et l’état du noyau.
Le contrôle ISSU unifié passe du processus de gestion au processus de châssis (chassisd). Le processus de châssis informe les différents processus logiciels (tels que rpd, apsd, bfdd, etc.) de l’ISSU unifié et attend les réponses de leur part.
Après avoir reçu des messages des processus logiciels indiquant que les processus sont prêts pour l’ISSU unifié, le processus de châssis sur le moteur de routage principal global envoie des messages au processus de châssis sur les nœuds de routage pour démarrer l’ISSU unifié.
Le processus de châssis sur les nœuds de routage envoie des messages ISSU_PREPARE aux unités remplaçables sur site (FRU), telles que les FPC et les PIC intelligents.
Après réception d’un message ISSU_PREPARE, les moteurs de transfert de paquets enregistrent les informations sur l’état actuel et téléchargent la nouvelle image logicielle à partir des moteurs de routage de sauvegarde. Ensuite, chaque moteur de transfert de paquets envoie ISSU_READY messages au processus de châssis. Vous pouvez afficher les messages de processus ISSU unifiés à l’aide de la
show log messagescommande.Après réception d’un message ISSU_READY des moteurs de transfert de paquets, le processus de châssis envoie un message ISSU_REBOOT aux FRU. Pendant la mise à niveau, les FRU continuent d’envoyer des messages ISSU_IN_PROGRESS au processus de châssis sur les nœuds de routage. À son tour, le processus de châssis de chaque nœud de routage envoie un message ISSU_IN_PROGRESS au processus de châssis sur le moteur de routage principal global.
Note:Les redémarrages du moteur de transfert de paquets qui se produisent au cours d’un ISSU unifié sont conçus pour avoir une fenêtre de temps d’arrêt très courte.
Après le redémarrage unifié d’ISSU (ISSU unifié), les moteurs de transfert de paquets rétablissent les informations d’état enregistrées et se reconnectent aux nœuds de routage. Le processus de châssis sur chaque nœud de routage envoie un message ISSU_READY au processus de châssis sur le moteur de routage principal global. Le message CM_MSG_READY du processus de châssis sur les nœuds de routage indique que l’ISSU unifié est terminé sur les FRU.
Le contrôle ISSU unifié revient au processus de gestion sur le moteur de routage principal global.
Le processus de gestion initie le basculement du moteur de routage sur les moteurs de routage principaux.
Le basculement du moteur de routage se produit sur le routeur TX Matrix et les routeurs T640.
Une fois le basculement effectué, les FRU se connectent aux nouveaux moteurs de routage principaux. Ensuite, le gestionnaire de châssis et le gestionnaire du moteur de transfert de paquets sur les FRU du routeur T640 se connectent aux nouveaux moteurs de routage principaux sur les routeurs T640.
Le processus de gestion du moteur de routage principal global lance le processus de mise à niveau des anciens moteurs de routage principaux sur les routeurs T640. (Cette étape est ignorée si vous avez spécifié l’option
no-old-master-upgradedans larequest system software in-service-upgradecommande.)Une fois que les moteurs de routage qui étaient auparavant les principaux sur les routeurs T640 sont mis à niveau, le processus de gestion lance la mise à niveau du moteur de routage qui était auparavant le principal global sur le routeur TX Matrix.
Une fois l’ISSU unifié réussi, le routeur TX Matrix et les routeurs T640 sont redémarrés si vous avez spécifié l’option
rebootdans larequest system software in-service-upgradecommande.
Comprendre la mise à niveau de logiciels en service (ISSU)
Une mise à niveau logicielle en service (ISSU) vous permet d’effectuer une mise à niveau entre deux versions différentes de Junos OS avec un minimum d’interruptions sur le plan de contrôle et de trafic. Au cours d’un ISSU, Junos OS s’exécute sur deux machines virtuelles (VM) distinctes : une VM joue le rôle principal en tant que moteur de routage principal et l’autre VM en tant que moteur de routage de secours. Junos OS est mis à niveau sur la machine virtuelle de sauvegarde. Une fois la mise à niveau logicielle réussie, la machine virtuelle de sauvegarde devient la machine virtuelle principale et la machine virtuelle principale d’origine n’est plus nécessaire et est arrêtée.
ISSU offre les avantages suivants :
Élimine les temps d’arrêt du réseau lors de la mise à niveau des images logicielles
Réduit les coûts d’exploitation tout en offrant des niveaux de service plus élevés
Permet une mise en œuvre rapide de nouvelles fonctionnalités
Processus de mise à niveau logicielle en service
Lorsque vous demandez un ISSU sur un appareil autonome :
Le processus de gestion (mgd) vérifie que le routage ininterrompu (NSR), le basculement GRES (Graceful moteur de routage) et le pontage ininterrompu (NSB) sont activés.
Le commutateur télécharge et valide le progiciel.
La machine d’état ISSU génère le moteur de routage (RE) de sauvegarde avec le logiciel le plus récent.
La machine d’état ISSU vérifie si l’ER de sauvegarde a synchronisé toutes les données avec l’ER principal.
La machine d’état ISSU déplace les périphériques (par exemple, l’ASIC de transfert, le FPGA, le port de gestion et la console série) du RE principal vers le RE de secours.
Le rôle principal est commuté entre les ER de secours, de sorte que le RE de secours devient le ER principal.
L’ancien ER principal est arrêté.
Comprendre la mise à niveau logicielle en service (ISSU) dans les routeurs ACX5000 Series
Une mise à niveau logicielle en service (ISSU) vous permet d’effectuer une mise à niveau entre deux versions différentes de Junos OS avec un minimum d’interruptions sur le plan de contrôle et de trafic. Au cours d’un ISSU, Junos OS s’exécute sur deux machines virtuelles (VM) distinctes : une VM joue le rôle principal en tant que moteur de routage principal et l’autre VM en tant que moteur de routage de secours. Junos OS est mis à niveau sur la machine virtuelle de sauvegarde. Une fois la mise à niveau logicielle réussie, la machine virtuelle de sauvegarde devient la machine virtuelle principale et la machine virtuelle principale d’origine n’est plus nécessaire et est arrêtée.
ISSU est pris en charge dans Junos OS version 15.1X54–D60 ou ultérieure pour les routeurs ACX5000 Series.
ISSU offre les avantages suivants :
Élimine les temps d’arrêt du réseau lors de la mise à niveau des images logicielles
Réduit les coûts d’exploitation tout en offrant des niveaux de service plus élevés
Permet une mise en œuvre rapide de nouvelles fonctionnalités
Processus de mise à niveau logicielle en service
Lorsque vous demandez un ISSU sur un appareil autonome :
Le processus de gestion (mgd) vérifie que le routage ininterrompu (NSR), le basculement GRES (Graceful moteur de routage) et le pontage ininterrompu (NSB) sont activés.
Le routeur télécharge et valide le progiciel.
La machine d’état ISSU génère le moteur de routage (RE) de sauvegarde avec le logiciel le plus récent.
La machine d’état ISSU vérifie si l’ER de sauvegarde a synchronisé toutes les données avec l’ER principal.
La machine d’état ISSU déplace les périphériques (par exemple, l’ASIC de transfert, le FPGA, le port de gestion et la console série) du RE principal vers le RE de secours.
Le rôle principal est commuté entre les ER de secours, de sorte que le RE de secours devient le ER principal.
L’ancien ER principal est arrêté.