Descripción del cambio de enrutamiento elegante
Descripción del cambio correcto del motor de enrutamiento
Este tema contiene las siguientes secciones:
- Conceptos de cambio de motor de enrutamiento elegante
- Efectos de un cambio de motor de enrutamiento
- Cambio correcto del motor de enrutamiento en interfaces de servicios agregados
Conceptos de cambio de motor de enrutamiento elegante
La función de cambio de motor de enrutamiento (GRES) de Junos OS y Junos OS evolucionado permite que un dispositivo con motores de enrutamiento redundantes continúe reenviando paquetes incluso si falla un motor de enrutamiento. GRES conserva la información de la interfaz y del kernel, y el tráfico no se interrumpe. Sin embargo, GRES no conserva el plano de control.
Los dispositivos vecinos detectan que el dispositivo ha experimentado un reinicio y reaccionan al evento de la manera prescrita por las especificaciones de protocolo de enrutamiento individuales.
Para conservar el enrutamiento durante un cambio, GRES debe combinarse con:
-
Extensiones de protocolo de reinicio elegantes
-
Enrutamiento activo sin interrupciones (NSR)
Cualquier actualización del motor de enrutamiento principal se replica en el motor de enrutamiento de reserva tan pronto como se produce.
Debido a sus requisitos de sincronización y lógica, el rendimiento de NSR/GRES está limitado por el motor de enrutamiento más lento del sistema.
El rol principal cambia al motor de enrutamiento de reserva si:
-
El kernel principal del motor de enrutamiento deja de funcionar.
-
El motor de enrutamiento principal experimenta un error de hardware.
-
El administrador inicia un cambio manual.
Para restaurar rápidamente o conservar la información de estado del protocolo de enrutamiento durante una conmutación, GRES debe combinarse con un reinicio correcto o un enrutamiento activo sin interrupciones, respectivamente. Para obtener más información acerca del reinicio correcto, consulte Conceptos de reinicio correcto. Para obtener más información acerca del enrutamiento activo sin parada, consulte Conceptos de enrutamiento activo sin parada.
Si el motor de enrutamiento de reserva no recibe un keepalive del motor de enrutamiento principal después de 2 segundos, determina que el motor de enrutamiento principal ha fallado; y asume la función principal.
El motor de reenvío de paquetes:
-
Se desconecta sin problemas del antiguo motor de enrutamiento primario
-
Se vuelve a conectar al nuevo motor de enrutamiento principal
-
No se reinicia
-
No interrumpe el tráfico
A continuación, se sincronizan el nuevo motor de enrutamiento principal y el motor de reenvío de paquetes. Si el nuevo motor de enrutamiento principal detecta que el estado del motor de reenvío de paquetes no está actualizado, reenvía los mensajes de actualización de estado.
Tenga en cuenta los siguientes comportamientos, recomendaciones o requisitos de GRES:
-
A partir de Junos OS versión 12.2, si se agotan las adyacencias entre el dispositivo de reinicio y los dispositivos "auxiliares" pares vecinos, las extensiones de protocolo de reinicio correcto no podrán notificar a los dispositivos "auxiliares" del mismo nivel sobre el reinicio inminente. Un reinicio agraciado puede detenerse y provocar interrupciones en el tráfico.
Para asegurarse de que se mantienen estas adyacencias, cambie el
hold-timevalor predeterminado de 27 segundos a un valor superior a 40 segundos. -
Los eventos sucesivos de cambio de motor de enrutamiento deben estar separados por un mínimo de 240 segundos (4 minutos) después de que se hayan instalado ambos motores de enrutamiento.
Si el dispositivo muestra un mensaje de advertencia similar a:
Standby Routing Engine is not ready for graceful switchover. Packet Forwarding Engines that are not ready for graceful switchover might be reset
entonces no intente un cambio. Si elige continuar con la conmutación, el dispositivo restablece solo los motores de reenvío de paquetes que no estaban listos para una conmutación elegante. Ninguno de los FPC debe reiniciarse espontáneamente. Le recomendamos que espere hasta que la advertencia ya no aparezca y, a continuación, continúe con el cambio.
-
No recomendamos:
-
Realizar una operación de confirmación en el motor de enrutamiento de reserva cuando GRES está habilitado en el dispositivo.
-
Habilitación de GRES en el motor de enrutamiento de respaldo en cualquier escenario.
-
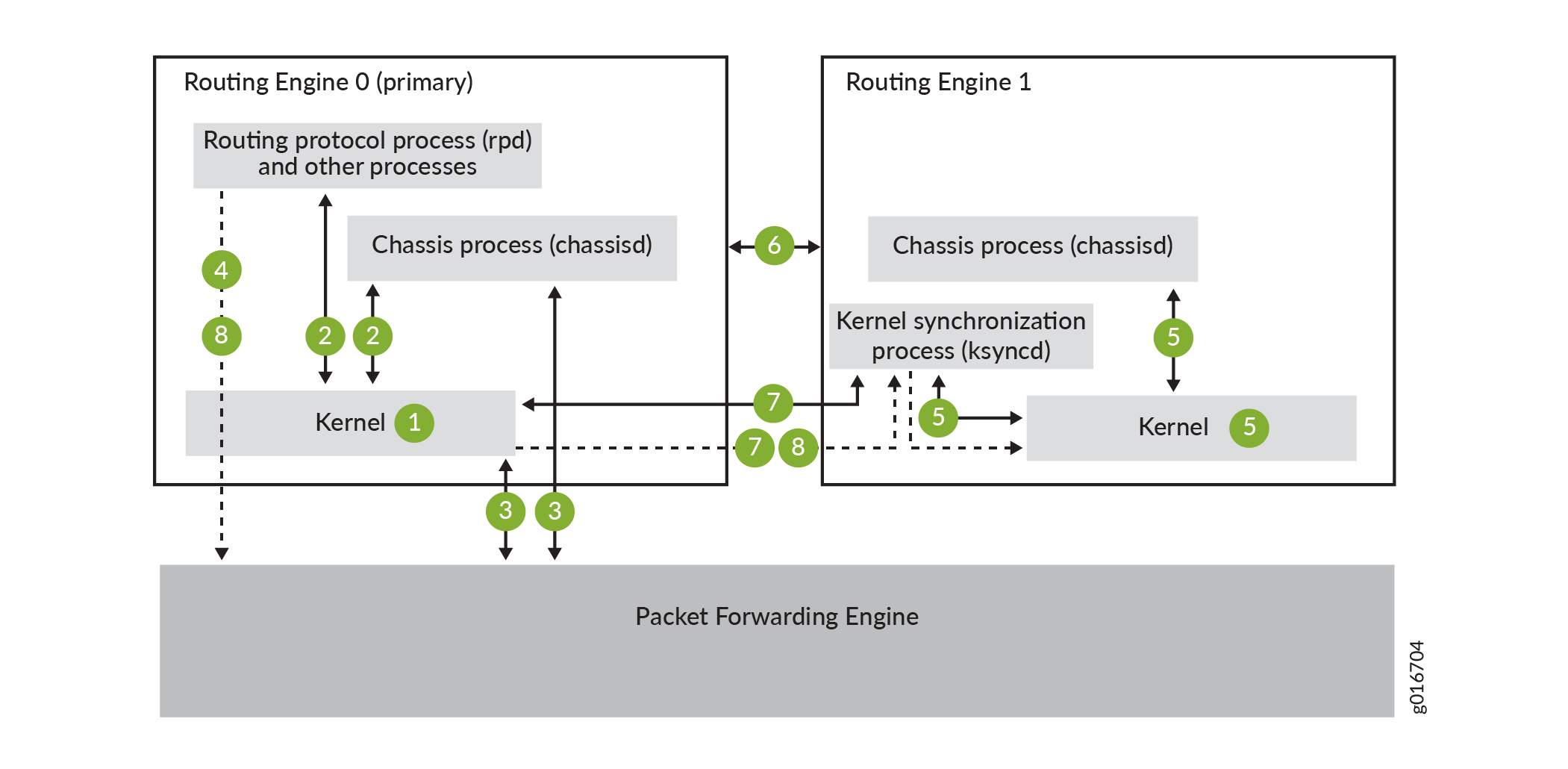
La figura 1 muestra la arquitectura del sistema de un cambio elegante del motor de enrutamiento y el proceso que sigue una plataforma de enrutamiento para prepararse para un cambio.
 de motor de enrutamiento elegante
de motor de enrutamiento elegante
Compruebe la preparación de GRES ejecutando ambos:
-
El
request chassis routing-engine master switch checkcomando del motor de enrutamiento principal -
El
show system switchovercomando del motor de enrutamiento de reserva
El proceso de preparación del cambio para GRES es el siguiente:
-
Se inicia el motor de enrutamiento principal.
-
Se inician los procesos de la plataforma de enrutamiento (como el proceso del chasis [chasisd]).
-
El motor de reenvío de paquetes se inicia y se conecta al motor de enrutamiento principal.
-
Toda la información del estado se actualiza en el sistema.
-
Se inicia el motor de enrutamiento de respaldo.
-
El sistema determina si se ha habilitado GRES.
-
El proceso de sincronización del kernel (ksyncd) sincroniza el motor de enrutamiento de copia de seguridad con el motor de enrutamiento principal.
-
Después de que ksyncd complete la sincronización, se actualizarán toda la información de estado y la tabla de reenvío.
La figura 2 muestra los efectos de un cambio en la plataforma de enrutamiento (o conmutación).
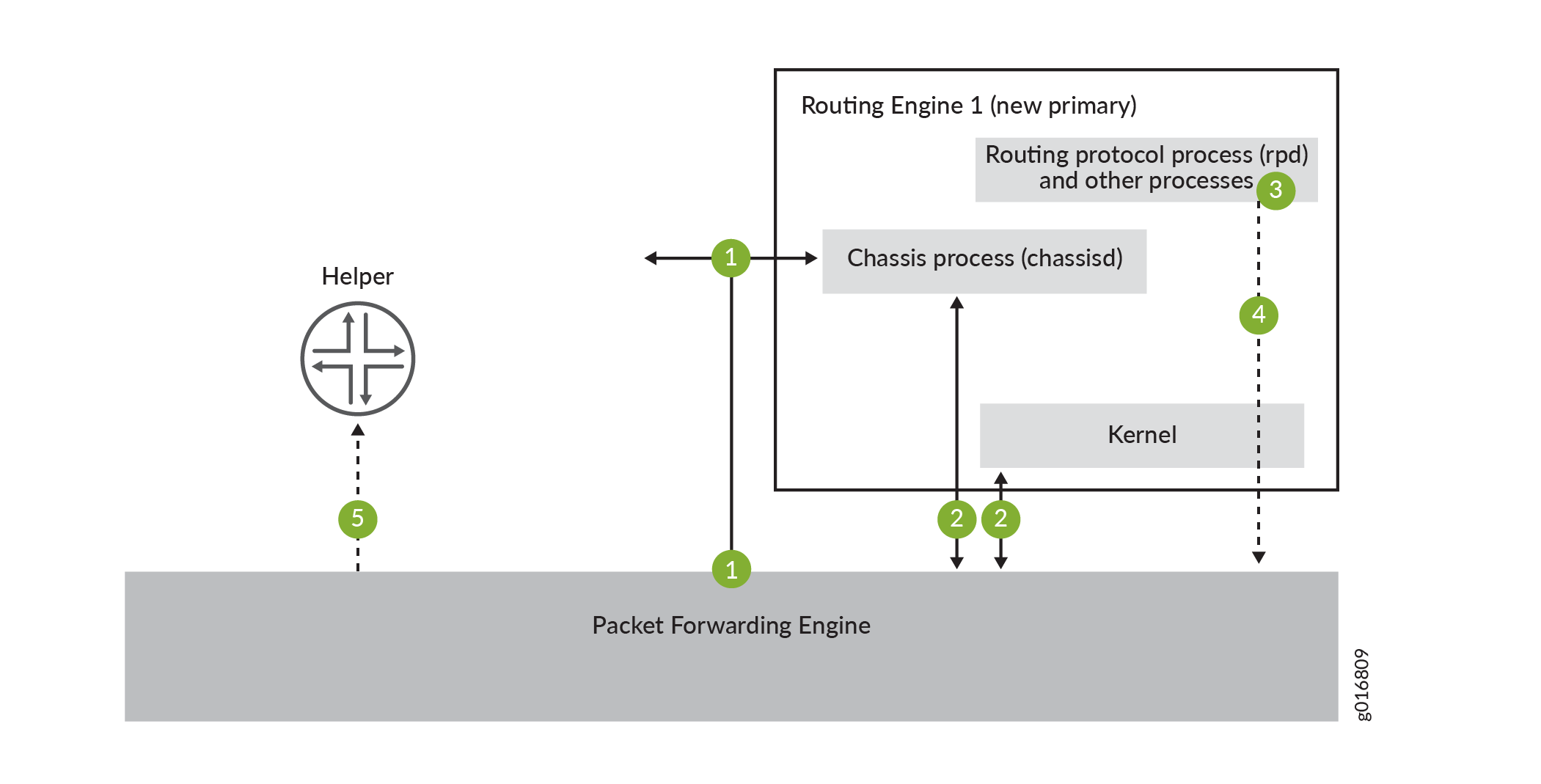
Un proceso de cambio comprende los siguientes pasos:
-
Cuando se pierden keepalives del motor de enrutamiento principal, el sistema cambia correctamente al motor de enrutamiento de reserva.
-
El motor de reenvío de paquetes se conecta al motor de enrutamiento de reserva, que se convierte en el nuevo motor principal.
-
Se reinician los procesos de plataforma de enrutamiento que no forman parte de GRES (como el rpd de proceso de protocolo de enrutamiento).
-
La información de estado aprendida desde el punto de la conmutación se actualiza en el sistema.
-
Si se configuran, las extensiones de protocolo de reinicio correcto recopilan y restauran información de enrutamiento de dispositivos auxiliares pares vecinos.
Use el Explorador de características para confirmar la compatibilidad de la plataforma y el lanzamiento de características específicas.
Revise la sección Comportamiento GRES específico de la plataforma para obtener notas relacionadas con su plataforma.
Efectos de un cambio de motor de enrutamiento
En la Tabla 1 se describen los efectos de un cambio de motor de enrutamiento cuando se habilitan diferentes funciones:
-
Sin funciones de alta disponibilidad
-
Cambio agraciado del motor de enrutamiento
-
Reinicio agraciado
-
Enrutamiento activo sin interrupciones
| Característica |
Beneficios |
Consideraciones |
|---|---|---|
| Solo motores de enrutamiento dual (sin funciones habilitadas) |
|
|
| GRES habilitado |
|
|
| Habilitado para GRES y NSR |
|
|
| GRES y reinicio elegante habilitados |
|
|
Cambio correcto del motor de enrutamiento en interfaces de servicios agregados
Si un comando de modo operativo desencadena un cambio correcto de motor de enrutamiento (GRES), el dispositivo no conserva el estado de las interfaces de servicios agregados (ASI). Por ejemplo:
request interface <switchover | revert> asi-interface
Sin embargo, si GRES se activa por una confirmación de CLI o un reinicio o bloqueo de FPC, el motor de enrutamiento de respaldo actualiza el estado de ASI. Por ejemplo:
set interface si-x/y/z disable commit
O:
request chassis fpc restart
Ver también
Requisitos del sistema de Graceful Routing Engine Switchover
El cambio de motor de enrutamiento elegante es compatible con todas las plataformas de enrutamiento (o conmutación) que contienen motores de enrutamiento duales. Todos los motores de enrutamiento configurados para un cambio correcto de motor de enrutamiento deben ejecutar la misma versión de Junos OS. La compatibilidad de hardware y software para el cambio correcto de motor de enrutamiento se describe en las secciones siguientes:
- Compatibilidad con una plataforma de cambio de motor de enrutamiento elegante
- Compatibilidad con la función Graceful Routing Engine Switchover
- Cambio de motor de enrutamiento y acceso de suscriptores
- Compatibilidad con PIC de cambio de motor de enrutamiento agraciado
Compatibilidad con una plataforma de cambio de motor de enrutamiento elegante
Para habilitar un cambio correcto de motor de enrutamiento, el sistema debe cumplir estos requisitos mínimos:
Enrutador MX960: versión 8.3 o posterior de Junos OS
Enrutador MX480: versión 8.4 o posterior de Junos OS (se recomienda 8.4R2)
Enrutador MX240: versión 9.0 o posterior de Junos OS
Enrutador PTX5000: Junos OS versión 12.1X48 o posterior
Conmutadores serie EX con motores de enrutamiento duales o en un chasis virtual — Junos OS versión 9.2 o posterior para conmutadores serie EX
Conmutadores de la serie QFX en un chasis virtual: versión 13.2 o posterior de Junos OS para la serie QFX
Conmutadores serie EX o QFX en una estructura de chasis virtual: Junos OS versión 13.2X51-D20 o posterior para los conmutadores serie EX y QFX
Para obtener más información acerca de la compatibilidad con el cambio correcto de motor de enrutamiento, consulte las secciones siguientes.
Compatibilidad con la función Graceful Routing Engine Switchover
El cambio de motor de enrutamiento elegante es compatible con la mayoría de las funciones de Junos OS de la versión 5.7 y posteriores. Algunas características particulares de Junos OS requieren versiones específicas de Junos OS. Ver Tabla 2.
Aplicación |
Versión de Junos OS |
|---|---|
Interfaces Ethernet agregadas con protocolo de control de agregación de vínculos (LACP) e interfaces SONET agregadas |
6.2 |
Modo de transferencia asíncrono (ATM) circuitos virtuales (VC) |
6.2 |
Sistemas lógicos
Nota:
En Junos OS versión 9.3 y posteriores, la función de enrutador lógico cambia de nombre a sistema lógico. |
6.3 |
Multidifusión |
6.4 (7.0 para enrutador TX Matrix) |
Protocolo punto a punto multivínculo (MLPPP) y relé de trama multivínculo (MLFR) |
7.0 |
Conmutación automática de protección (APS): la interfaz activa actual (ya sea la interfaz de trabajo designada o la interfaz de protección designada) sigue siendo la interfaz activa durante un cambio de motor de enrutamiento. |
7.4 |
Conmutación de etiquetas multiprotocolo punto a multipunto MPLS LSP (solo tránsito) |
7.4 |
Protocolo de transporte comprimido en tiempo real (CRTP) |
7.6 |
Servicio de LAN privada virtual (VPLS) |
8.2 |
Operación, administración y gestión de Ethernet (OAM) según lo definido por IEEE 802.3ah |
8.5 |
Agente de retransmisión DHCP extendido |
8.5 |
OAM de Ethernet según lo definido por IEEE 802.1ag |
9.0 |
Proceso del Protocolo de control de puerta de enlace de paquetes (PGCPD) en multiservicios 500 PIC en enrutadores T640. |
9.0 |
Acceso de suscriptores |
9.4 |
Configuración redundante de pseudocables VPLS basada en LDP y circuito de capa 2 |
9.6 |
Las siguientes restricciones se aplican a la compatibilidad con la característica de cambio de motor de enrutamiento:
Cuando se configuran interfaces Ethernet agregadas y de conmutación de motor de enrutamiento en el mismo sistema, las interfaces Ethernet agregadas no deben configurarse para LACP de sondeo rápido. Cuando se configura el sondeo rápido, se agota el tiempo de espera de los sondeos LACP en el extremo remoto durante el cambio de rol principal del motor de enrutamiento. Cuando se agota el tiempo de espera del sondeo LACP, el vínculo agregado y la interfaz se deshabilitan. El cambio de rol principal del motor de enrutamiento es lo suficientemente rápido como para que el sondeo LACP lento y estándar no agote el tiempo de espera durante el procedimiento.
Nota:Las sesiones de MACSec se agitarán al cambiar el motor de enrutamiento elegante.
A partir de Junos OS versión 13.2, cuando se produce un cambio correcto de motor de enrutamiento, el estado VRRP no cambia. VRRP es compatible con un cambio de motor de enrutamiento elegante solo en el caso de que la delegación PPM esté habilitada (que es la predeterminada).
Cambio de motor de enrutamiento y acceso de suscriptores
Actualmente, el cambio de motor de enrutamiento elegante admite la mayoría de las funciones directamente asociadas con el acceso dinámico de suscriptores DHCP y PPPoE dinámico. El cambio de motor de enrutamiento elegante también admite la actualización unificada de software en servicio (ISSU) para el modelo de acceso DHCP y el modelo de acceso PPPoE utilizado por el acceso de suscriptor.
Cuando se habilita el cambio de motor de enrutamiento para la administración de suscriptores, todos los motores de enrutamiento del enrutador deben tener la misma cantidad de DRAM para un funcionamiento estable.
Compatibilidad con PIC de cambio de motor de enrutamiento agraciado
El cambio de motor de enrutamiento correcto se admite en la mayoría de las PIC, excepto en las PIC de servicios enumeradas en esta sección. El PIC debe estar en una plataforma de enrutamiento compatible que ejecute la versión adecuada de Junos OS. Para obtener información acerca de los tipos de FPC, la compatibilidad de FPC/PIC y la versión inicial de Junos OS en la que una FPC admitía una PIC determinada, consulte la guía de PIC de su plataforma de enrutador.
Las siguientes restricciones se aplican a la compatibilidad con un cambio de motor de enrutamiento correcto para PIC de servicios:
Puede incluir la
graceful-switchoverinstrucción en el nivel de[edit chassis redundancy]jerarquía en un enrutador con las PIC de servicios adaptativos, multiservicios y servicios de túnel configuradas en él, y confirmar correctamente la configuración. Sin embargo, todos los servicios de estas PIC, excepto los paquetes de servicios de capa 2 y las aplicaciones de SDK y proveedor de extensiones en PIC de multiservicios, se restablecen durante una conversión.El cambio correcto de motor de enrutamiento no se admite en ninguna PIC de servicios de supervisión ni PIC de servicios multivínculo. Si incluye la
graceful-switchoverinstrucción en el[edit chassis redundancy]nivel de jerarquía en un enrutador con cualquiera de estos tipos de PIC configurados y emite el comando, se producirá uncommiterror en la confirmación.El cambio de motor de enrutamiento correcto no se admite en las PIC multiservicios 400 configuradas para aplicaciones de servicios de supervisión. Si incluye la instrucción, se producirá un
graceful-switchovererror en la confirmación.
Cuando una PIC no compatible está en línea, no puede habilitar el cambio correcto del motor de enrutamiento. Si el cambio correcto de motor de enrutamiento ya está habilitado, no se puede conectar una PIC no compatible.
Ver también
Comportamiento GRES específico de la plataforma
Use el Explorador de características para confirmar la compatibilidad de la plataforma y el lanzamiento de características específicas.
Use la tabla siguiente para revisar los comportamientos específicos de la plataforma para su plataforma:
| Diferencia de | plataforma |
|---|---|
| Serie MX |
|
| Serie PTX |
|
| Serie QFX |
|
Tabla de historial de cambios
La compatibilidad con las funciones viene determinada por la plataforma y la versión que esté utilizando. Utilice el Explorador de características para determinar si una característica es compatible con su plataforma.