RED Drop Profile 및 패킷 손실 우선순위를 사용하여 혼잡 관리
각 출력 대기열의 혼잡을 제어하기 위해 두 가지 매개 변수를 구성할 수 있습니다. 첫 번째 매개 변수는 지연 버퍼 대역폭을 정의하며, 이는 대기열 증가가 지정된 지연 버퍼 시간 및 출력 속도 제품까지 버스트 트래픽을 흡수할 수 있도록 합니다. 지정된 지연 버퍼가 가득 차면 대기열의 테일에서 100% 드롭 확률로 패킷이 손실됩니다. 자세한 내용은 스케줄러 버퍼 크기를 구성하여 송신 인터페이스의 혼잡 관리를 참조하십시오.
두 번째 매개 변수는 지연 버퍼 점유 범위에 걸쳐 드롭 확률 을 정의하여 RED(Random Early Detection) 프로세스를 지원합니다. 대기열에 있는 패킷 수가 라우터 또는 스위치가 대기열을 비우는 것보다 클 때, 대기열에는 네트워크에서 드롭할 패킷을 결정하는 방법이 필요합니다. 이를 해결하기 위해 Junos OS 개별 대기열에서 RED를 활성화하는 옵션을 제공합니다.
손실 확률에 따라 RED는 버퍼가 가득 차기 훨씬 전에 많은 패킷이 손실되거나 버퍼가 거의 가득 차 있어도 몇 개의 패킷만 손실될 수 있습니다.
드롭 프로파일은 네트워크에서 패킷을 삭제할 수 있는 매개 변수를 정의하는 RED 메커니즘입니다. 드롭 프로파일은 패킷 손실 우선순위의 의미를 정의합니다.
드롭 프로파일을 구성할 때 대기열 완전성과 드롭 확률이라는 두 가지 중요한 값이 있습니다. 대기열 완전성은 특정 대기열 에 할당된 총 양과 관련하여 패킷을 저장하는 데 사용되는 메모리의 비율을 나타냅니다. 마찬가지로 , 드롭 확률 은 개별 패킷이 네트워크에서 손실될 가능성과 상관관계가 있는 백분율 값입니다. 그림 1과 같이 이러한 두 변수 기능이 그래프 형식으로 어떻게 설명되는지 확인합니다.
드롭 프로파일당 지원되는 최대 대기열 완전성 수준은 라인 카드를 기반으로 합니다.
-
MX 시리즈 라우터용 큐잉 또는 Enhanced Queuing MPC의 MIC에서 호스팅되는 물리적 또는 논리적 인터페이스는 이산 또는 보정 드롭 프로파일당 최대 64개의 페어(채우기 수준, 드롭 확률)를 지원합니다.
-
MX 시리즈 라우터용 Enhanced Queuing DPC에서 호스팅되는 물리적 또는 논리적 인터페이스는 개별 드롭 프로파일당 최대 64 페어(채우기 수준, 드롭 확률) 페어 또는 보간 드롭 프로파일당 2 페어를 지원합니다. 자세한 내용은 Enhanced Queuing DPC에서 WRED 구성을 참조하십시오.
-
IQ2 PIC 또는 IQE PIC에서 호스팅되는 물리적 또는 논리적 인터페이스는 이산 또는 보정 드롭 프로파일당 최대 2개의(채우기 수준, 드롭 확률) 페어를 지원합니다.
-
Junos OS Evolved를 실행하는 Junos OS 및 PTX10003 라우터를 실행하는 라우터를 PTX 시리즈 이산 또는 보정 드롭 프로파일당 최대 64 페어(채우기 수준, 드롭 확률) 페어를 지원합니다.
-
Junos OS Evolved를 실행하는 다른 PTX 시리즈 라우터는 보정 드롭 프로파일당 최대 2개의(채우기 수준, 드롭 확률) 페어를 지원합니다. 단일 페어 드롭 프로필은 이산입니다. 두 쌍이 보간됩니다.
그림 1 은 이산 그래프와 인터폴레이션 그래프를 모두 보여줍니다. 이러한 그래프 선의 형성은 다르지만 프로필의 적용은 동일합니다. 패킷이 대기열의 테일에 합류하면 0에서 100 사이의 임의의 숫자가 라우터 또는 스위치에 의해 계산됩니다. 이 임의의 숫자는 해당 특정 대기열의 현재 대기열 전체를 사용하여 드롭 프로파일에 대해 플로팅됩니다. 임의의 수가 그래프 선 위에 떨어지면 패킷이 물리적 미디어로 전송됩니다. 숫자가 그래프 선 아래로 떨어지면 네트워크에서 패킷이 손실됩니다.
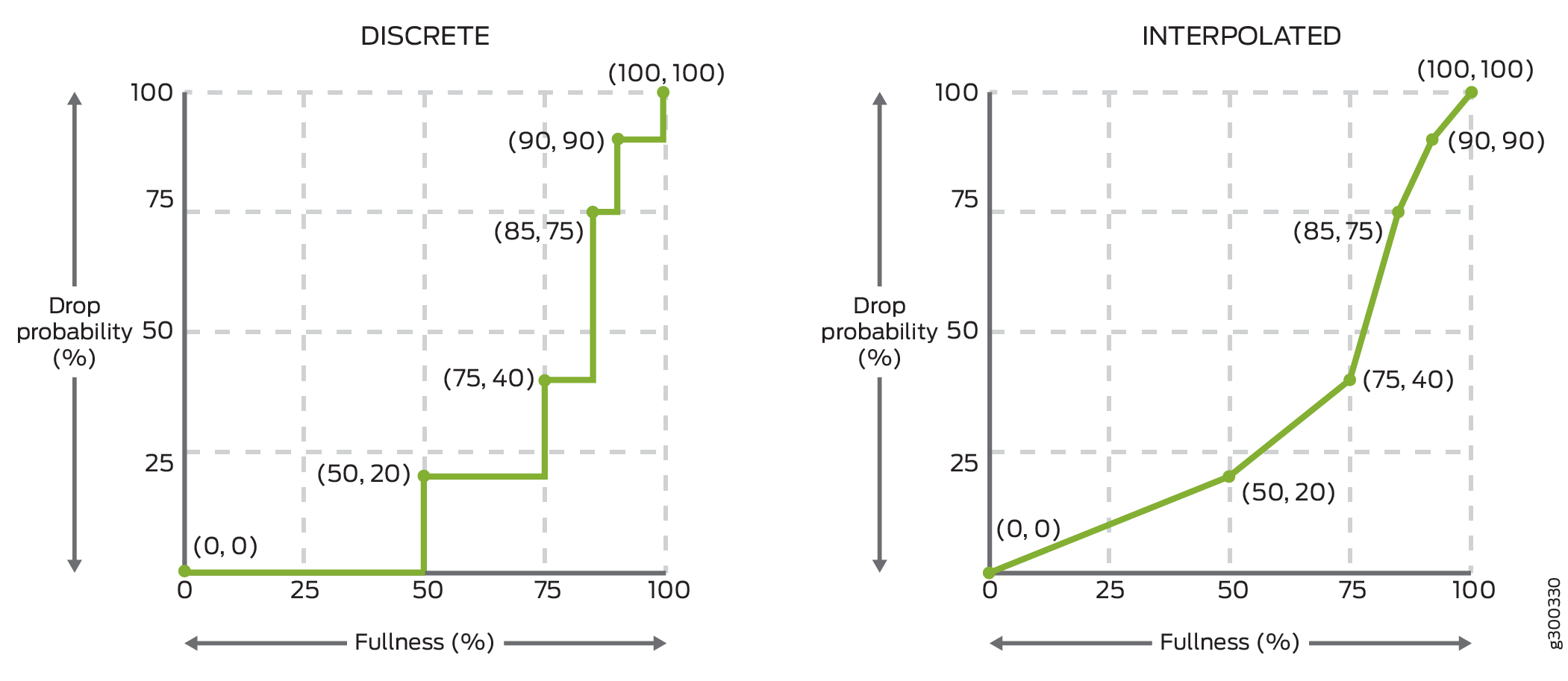
드롭 프로파일은 여러 채우기 수준 및 드롭 확률을 정의하여 생성되며 x축이 채우기 수준을 나타내고 y축이 드롭 확률을 나타내는 그래프로 나타낼 수 있습니다.
왼쪽 그림 1 과 같이 개별 프로필 그래프를 생성하려면 소프트웨어가 왼쪽 아래 모서리에서 시작되어 0%의 채우기 수준과 0%의 드롭 확률을 나타냅니다. 이 구성은 첫 번째 정의된 채우기 수준에 도달할 때까지 전체 수준(l) x축의 오른쪽에 수평으로 선을 생성하며, 이 구성에 대해 50%는 20%의 드롭 확률(p)으로 지정됩니다. 그런 다음 소프트웨어는 다음 드롭 확률이 40%의 지정된 드롭 확률을 갖는 75% 채우기 수준의 지정된 데이터 포인트에 도달할 때까지 채우기 수준을 따라 수평으로 줄을 계속합니다. 그런 다음 선은 85%의 다음 채우기 수준과 75%의 지정된 드롭 확률로 수평으로 계속됩니다. 선은 90%의 지정된 채우기 수준인 90%의 다음 지정된 채우기 수준으로 수평으로 계속되며, 데이터 포인트 90%(l), 90%(p)(l90 p90)에 지정된 줄이 생성됩니다. l90 p90 포인트에서 선은 100%의 드롭 확률을 가진 100%의 채우기 수준으로 수평으로 계속되며, 100%의 드롭 확률로 100% 채우기 수준인 100-100의 엔드 포인트로 상승합니다.
폴링된 드롭 프로파일이 지정된 경우, 첫 번째 쿼드런트에서 초기 라인 세그먼트는 원본(0,0)에서 다음 정의 지점까지 확장됩니다. 정의된 fill-level/drop-probability 포인트에서 최종 라인 세그먼트가 연결될 때까지 두 번째 줄이 다음 지점까지 실행됩니다(100, 100). 소프트웨어는 계산된 라인 세그먼트와 근사하게 되는 드롭 확률에서 64개의 채우기 수준을 포함하는 드롭 프로파일을 자동으로 구성합니다.
라우터 패밀리 전반에서 일관된 동작을 위해 드롭 프로파일 구성에 페어(100, 100)를 포함합니다.
명령문으로 프로필을 구성하여 더 원활한 그래프 선을 생성할 interpolate 수 있습니다. 이를 통해 소프트웨어는 그래프에서 (0, 0)에서 시작하여 (100, 100)로 끝나는 64개의 데이터 포인트를 자동으로 생성할 수 있습니다. 그 과정에서 그래프 라인은 정의한 특정 데이터 포인트를 상호 연결합니다.
문을 구성하는 interpolate 경우 64쌍 이상을 지정할 수 있지만 시스템은 64개의 개별 항목만 생성합니다.
손실 우선순위를 통해 패킷 드롭의 우선순위를 설정할 수 있습니다. 손실 우선순위는 패킷의 상대적 주문에 영향을 미치지 않으면서 패킷의 스케줄링에 영향을 미칩니다. 혼잡 제어 전략의 일환으로 패킷 손실 우선순위(PLP) 비트를 사용할 수 있습니다. 손실 우선 순위 설정을 사용하여 혼잡을 경험한 패킷을 식별할 수 있습니다. 일반적으로 손실 우선순위가 높은 서비스 수준을 초과하는 패킷을 표시합니다. 분류자 또는 폴리서 구성을 통해 손실 우선순위를 설정합니다. 손실 우선 순위는 워크플로우의 후반부에서 RED에서 사용되는 드롭 프로파일 중 하나를 선택하는 데 사용됩니다.
CoS(Class of Service) 구성 계층의 드롭 프로파일 섹션에서 드롭 확률을 지정하고 각 스케줄러 구성에서 해당 손실 우선순위에 매핑합니다. 각 스케줄러에 대해 손실 우선 순위의 각 조합(낮음, 중-로우, 중-고 또는 고)l에 대해 하나씩 여러 개의 개별 드롭 프로파일을 구성할 수 있습니다.
최대 32개의 드롭 프로파일을 구성할 수 있습니다.
RED 드롭 프로필을 구성하려면 계층 수준에서 다음 문을 [edit class-of-service] 포함합니다.
[edit class-of-service] drop-profiles { profile-name { fill-level percentage drop-probability percentage; interpolate { drop-probability [ values ]; fill-level [ values ]; } } }
주니퍼 네트웍스 M320 멀티서비스 에지 라우터 또는 T 시리즈 코어 라우터에서 드롭 프로파일을 구성하지 않으면 기본적으로 RED(Random Early Detection)가 적용되며 혼잡을 관리하기 위한 기본 메커니즘으로 기능합니다. 기본 RED 드롭 프로파일에서 채우기 수준이 0%인 경우 드롭 확률은 0%입니다. 채우기 수준이 100%인 경우 드롭 확률은 100%입니다.
혼잡을 관리하는 백업 방법으로, 작은 패킷의 혼잡이 발생할 때 테일 드롭이 적용됩니다. M320 및 T 시리즈 코어 라우터에서 소프트웨어는 Tail-RED를 지원하므로 테일 드롭이 발생하면 소프트웨어가 RED를 사용하여 지능형 테일 드롭을 실행합니다. 다른 라우터에서 소프트웨어는 무조건 테일 드롭을 실행합니다.