グレースフル ルーティング エンジン スイッチオーバーの理解
このトピックには、以下のセクションが含まれています。
グレースフル ルーティング エンジン スイッチオーバーの概念
Junos OSおよびJunos OS Evolvedのグレースフルルーティングエンジンスイッチオーバー(GRES)機能により、冗長ルーティングエンジンを持つルーターは、1つのルーティングエンジンに障害が発生しても、転送パケットを続行できます。GRES は、インターフェイスとカーネル情報を保持します。トラフィックは中断されません。ただし、GRES は制御プレーンを保持しません。
Junos OS Evolvedを実行しているPTX10004、PTX10008、およびPTX10016プラットフォームでは、GRESはデフォルトで有効になっており、無効にできません。
T シリーズ ルーター、TX Matrix ルーター、TX Matrix Plus ルーターでは、ノンストップ アクティブ ルーティング(NSR)を備えた GRES の場合、コントロール プレーンが保持され、パケット転送エンジン当たりのライン レートの約 75% が GRES 中も中断されません。
隣接ルーターは、ルーターが再起動したことを検出し、個々のルーティングプロトコル仕様に規定された方法でイベントに反応します。
スイッチオーバー中にルーティングを保持するには、GRES を次のいずれかと組み合わせる必要があります。
グレースフル リスタート プロトコル拡張
ノンストップ アクティブ ルーティング (NSR)
プライマリ ルーティング エンジンの更新は、発生するとすぐにバックアップ のルーティング エンジンに複製されます。
同期要件とロジックにより、NSR/GRES のパフォーマンスはシステム内で最も遅いルーティング エンジンによって制限されます。
プライマリロールは、以下の場合にバックアップのルーティングエンジンに切り替えられます。
プライマリ ルーティング エンジン カーネルは動作を停止します。
プライマリールーティングエンジンにハードウェア障害が発生します。
管理者は手動のスイッチオーバーを開始します。
スイッチオーバー中にルーティング プロトコルの状態情報を迅速に復元または保持するには、GRES をそれぞれグレースフル リスタートまたはノンストップ アクティブ ルーティングと組み合わせる必要があります。グレースフル リスタートの詳細については、「 グレースフル リスタートの概念」を参照してください。ノンストップアクティブルーティングの詳細については、 ノンストップ アクティブルーティングの概念を参照してください。
バックアップルーティングエンジンが2秒(M20ルーターでは4秒)後にプライマリルーティングエンジンからキープアライブを受信しない場合、プライマリルーティングエンジンに障害が発生したと判断します。主な役割を引き受けます。
パケット転送エンジン:
古いプライマリ ルーティング エンジンからシームレスに切断
新しいプライマリ ルーティング エンジンに再接続する
再起動しない
トラフィックを中断しない
その後、新しいプライマリ ルーティング エンジンとパケット転送エンジンが同期されます。新しいプライマリ ルーティング エンジンが、パケット転送エンジンの状態が最新ではないことを検出すると、状態更新メッセージを再送信します。
Junos OSリリース12.2以降、再起動するルーターと隣接するピア'ヘルパー'ルーターの間の隣接関係がタイムアウトすると、グレースフルリスタートプロトコル拡張は、差し迫った再起動についてピア'ヘルパー'ルーターに通知できません。グレースフル リスタートは、その後、トラフィックを停止し、中断を引き起こすことができます。
これらの隣接関係が維持されるようにするには、IS-ISプロトコルの hold-time デフォルトの27秒から40秒より高い値に変更します。
連続するルーティングエンジンスイッチオーバーイベントは、両方のルーティングエンジンが起動した後、最低240秒(4分)離れる必要があります。
ルーターまたはスイッチに に類似 Standby Routing Engine is not ready for graceful switchover. Packet Forwarding Engines that are not ready for graceful switchover might be reset した警告メッセージが表示されている場合、スイッチオーバーを試みないでください。スイッチオーバーを続行する場合、グレースフル スイッチオーバーの準備ができていなかったパケット転送エンジンのみがリセットされます。どの FPC も自発的に再起動するべきではありません。警告が表示されるまで待ってから、スイッチオーバーを続行することをお勧めします。
Junos OS リリース 14.2 以降、MX シリーズ ルーターで GRES を実行する場合、新しいプライマリ ルーティング エンジンで運用モード コマンドを実行 clear synchronous-ethernet wait-to-restore して、復元までの待機タイマーをクリアする必要があります。これは、運用モード コマンドが clear synchronous-ethernet wait-to-restore ローカル ルーティング エンジンでのみ、復元までの待機タイマーを解除するためです。
TX Matrix Plus ルーターと 3D SIB を搭載したルーティング マトリクスでは、連続するルーティング エンジン スイッチオーバーの場合、両方のルーティング エンジンが起動した後、イベントは少なくとも 900 秒(15 分)離れる必要があります。
GRES は、同期の問題を回避するために、1 つのラインカード シャーシ(LCC)(3D SIB を搭載した TX Matrix ルーターの)で一度に実行する必要があります。
ルーターまたはスイッチで GRES が有効になっている場合、バックアップ ルーティング エンジンでコミット操作を実行することはお勧 めしません 。
どのシナリオでも、バックアップルーティングエンジンでGRESを有効にすることはお勧めしません。
QFX10000スイッチでは、GRESでノンストップルーティングが有効になっている場合、 階層レベルで [edit routing-options] ステートメントを設定nsr-phantom-holdtime secondsすることを強くお勧めします。これにより、トラフィックの損失を防ぐことができます。このステートメントを設定すると、指定されたホールドタイム間隔が終了するまで、ファントム IP アドレスはスイッチオーバー中カーネルに残ります。間隔が終了すると、これらのルートは適切なルーティングテーブルに追加されます。EVPN(イーサネットVPN)/VXLAN環境では、ホールドタイム値を300秒(5分)に指定することをお勧めします。
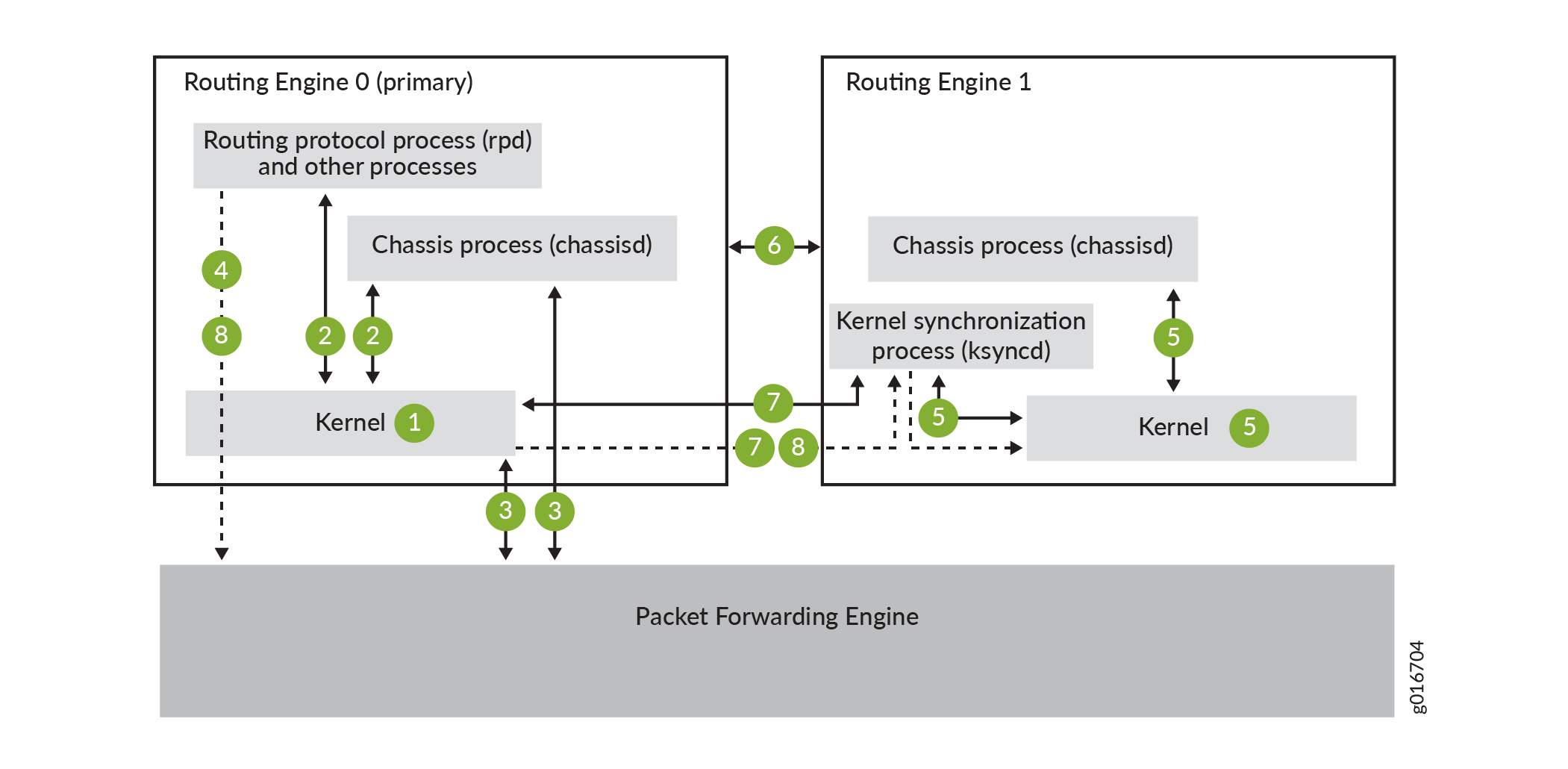
図 1 は、グレースフル ルーティング エンジン スイッチオーバーのシステム アーキテクチャを示し、ルーティング プラットフォームがスイッチオーバーに備えるプロセスを示しています。
 の準備
の準備
次の両方を実行して、GRES の準備状況を確認します。
request chassis routing-engine master switch checkプライマリ ルーティング エンジンからの コマンドshow system switchoverバックアップ ルーティング エンジンからの コマンド
GRES のスイッチオーバー準備プロセスは次のとおりです。
プライマリ ルーティング エンジンが起動します。
ルーティング プラットフォーム プロセス(シャーシ プロセス[chassisd]など)が開始されます。
パケット転送エンジンは、プライマリ ルーティング エンジンを開始し、プライマリー ルーティング エンジンに接続します。
すべての状態情報はシステムで更新されます。
バックアップ ルーティング エンジンが起動します。
システムは、GRES が有効になっているかどうかを判断します。
カーネル同期プロセス(ksyncd)は、バックアップ ルーティング エンジンをプライマリ ルーティング エンジンと同期します。
ksyncd が同期を完了すると、すべての状態情報と転送テーブルが更新されます。
図 2 は、ルーティング(またはスイッチング)プラットフォームでのスイッチオーバーの効果を示しています。
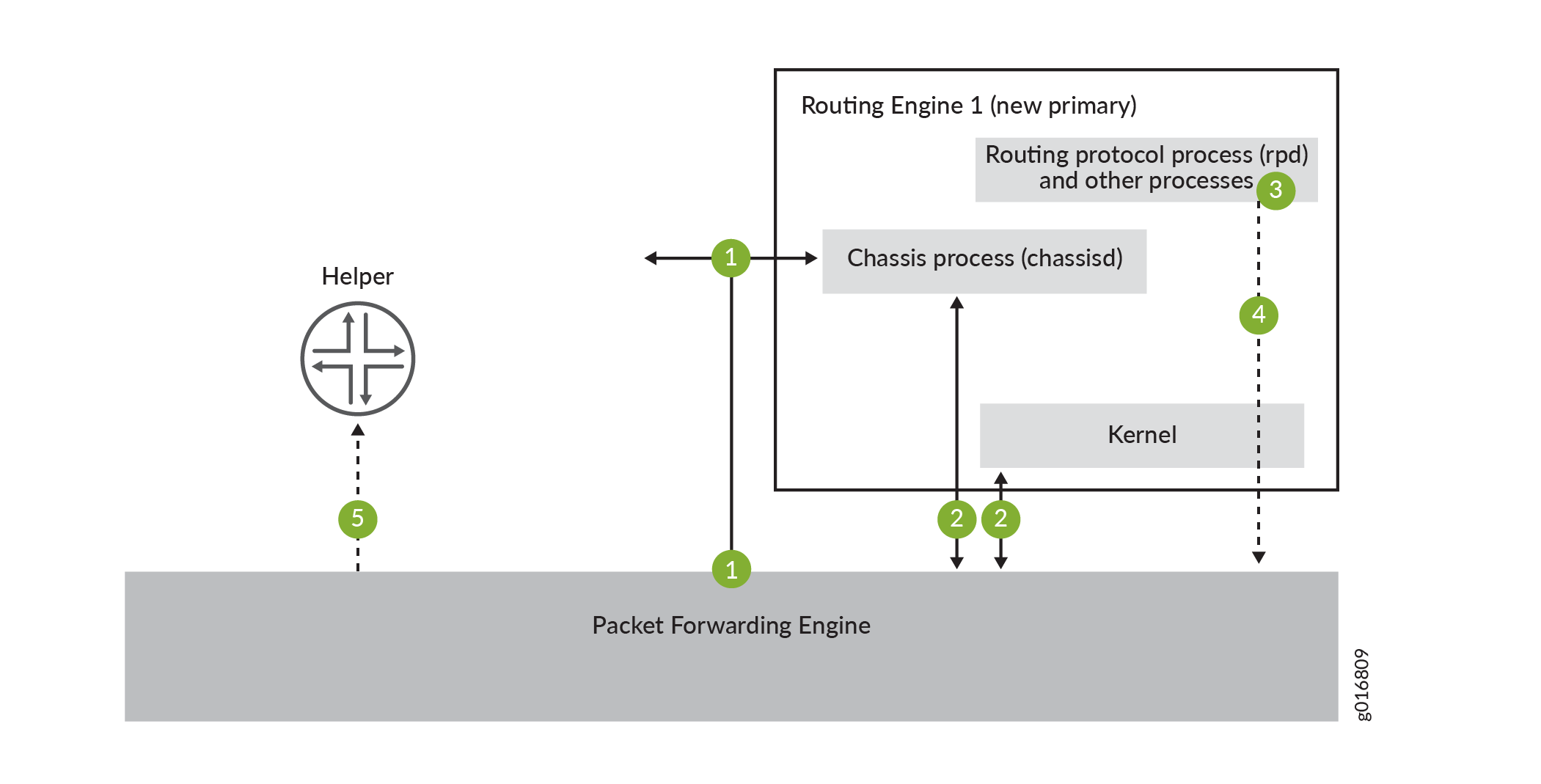
スイッチオーバー プロセスは、以下のステップで構成されています。
プライマリ ルーティング エンジンからのキープアライブが失われると、システムはグレースフルにバックアップ ルーティング エンジンにスイッチオーバーします。
パケット転送エンジンは、バックアップのルーティングエンジンに接続し、これが新しいプライマリになります。
GRES の一部ではないルーティング プラットフォーム プロセス(ルーティング プロトコル プロセス rpd など)の再起動。
スイッチオーバーポイントから学習した状態情報は、システムで更新されます。
設定されている場合、グレースフルリスタートプロトコル拡張は、隣接するピア ヘルパー ルーターからルーティング情報を収集して復元します。
拡張加入者管理を使用するMXシリーズルーターでは、グレースフルルーティングエンジンスイッチオーバーが実行されると、新しいバックアップルーティングエンジン(以前のプライマリルーティングエンジン)が再起動します。このコールドリスタートは、バックアップのルーティングエンジンの状態を新しいプライマリルーティングエンジンの状態と再同期し、スイッチオーバー中に発生した可能性のある状態の不一致を防ぎます。
T Series の GRES および GRES 中の M320 ルーターでは、SIB(スイッチ インターフェイス ボード)がオフラインになり、1 つずつ再起動されます。これは、関連する SIB の状態情報を入力するのに十分な時間を SIB に管理するスイッチ プロセッサー のメザニン ボード(SPMB)を提供するために行われます。ただし、すべてのFPCがフルラインレートでトラフィックを送信している完全に搭載されたシャーシでは、スイッチオーバー中に一瞬のパケットロスが発生する可能性があります。
GRES が設定されており restart chassis-control 、 コマンドが 3D SIB を持つ TX Matrix Plus ルーターで実行された場合、どのルーティング エンジンがプライマリになるのか確認できません。これは、シャーシされたプロセスが コマンドの実行 restart chassis-control で再起動するためです。シャーシされたプロセスは、プライマリロールの維持と保持を担当し、再起動すると、ルーターまたはスイッチの負荷に基づいて新しいシャーシが処理されます。その結果、ルーティング エンジンのいずれかがプライマリになります。
ルーティング エンジンのスイッチオーバーの影響
表 1 は、異なる機能が有効になっている場合のルーティング エンジン スイッチオーバーの効果を示しています。
高可用性機能なし
グレースフル ルーティング エンジン スイッチオーバー
グレースフル リスタート
ノンストップ アクティブ ルーティング
機能 |
利点 |
考慮 事項 |
|---|---|---|
デュアル ルーティング エンジンのみ(有効な機能なし) |
|
|
GRES が有効 |
|
|
GRES および NSR が有効 |
|
|
GRES および グレースフル リスタートが有効 |
|
|
アグリゲート サービス インターフェイスでのグレースフル ルーティング エンジン スイッチオーバー
グレースフル ルーティング エンジン スイッチオーバー(GRES)が動作モード コマンドによってトリガーされた場合、集約されたサービス インターフェイス(ASI)の状態は保存されません。例えば:
request interface <switchover | revert> asi-interface
ただし、CLI コミットまたは FPC の再起動またはクラッシュによって GRES がトリガーされた場合、バックアップ ルーティング エンジンは ASI 状態を更新します。例えば:
set interface si-x/y/z disable commit
または:
request chassis fpc restart
clear synchronous-ethernet wait-to-restore して、復元までの待機タイマーをクリアする必要があります。