Sous-système hôte MX2008
Description du sous-système hôte MX2008
Le sous-système hôte fournit des processus de protocole de routage, ainsi que des processus logiciels qui contrôlent l’interface du routeur, les composants du châssis, la gestion du système et l’accès des utilisateurs au routeur. Ces processus de routage s’exécutent sur un noyau qui interagit avec le moteur de transfert de paquets. Le sous-système hôte MX2008 se compose de deux cartes de routage et de contrôle, ou RCB. Le RCB est une carte intégrée et une FRU unique qui fournit des fonctionnalités de moteur de routage et de carte de contrôle. Le moteur de routage assure toutes les fonctions de traitement de routage, tandis que le CB assure la fonctionnalité de plan de contrôle et de gestion du châssis. Le RCB fournit des fonctions de plan de contrôle. Vous pouvez installer un ou deux RCB sur le routeur. Chaque RCB fonctionne comme une unité.
Le RCB MX2008 est similaire aux CB-RE natifs pris en charge par les routeurs MX2000, à la seule différence que le RCB MX2008 est moins de la moitié de la taille du MX2000 CB-RE.
Installez deux RCB pour une protection redondante. Si vous n’installez qu’un seul RCB, vous pouvez l’installer dans l’emplacement 0 ou 1.
Si l’un des RCB tombe en panne, ne retirez pas le RCB défaillant tant que vous n’avez pas installé un panneau de remplacement ou vierge.
Voir aussi
Description de la carte de routage et de contrôle MX2008 (MX2008 RCB)
La carte de routage et de contrôle MX2008 (MX2008 RCB) est une carte intégrée et une FRU unique qui fournit des fonctionnalités de moteur de routage et de carte de contrôle.
Le RCB REMX2008-X8-128G est équipé d’un processeur 8 cœurs 2,3 GHz, 128 Go de mémoire et deux SSD de 200 Go et prend également en charge le démarrage sécurisé pour une sécurité de démarrage améliorée.
Le REMX2008-X8-64G-LT RCB est équipé d’un processeur 8 cœurs 2,3 GHz, de 64 Go de mémoire et de deux SSD de 100 Go. Le RCB est équipé d’une prise en charge limitée du cryptage uniquement.
RCB pris en charge
Voici quelques attributs clés du RCB MX2008 :
Le RCB a combiné la carte de contrôle et le moteur de routage en une seule FRU.
Le RCB est enfichable à chaud.
Le RCB fait moins de la moitié de la taille de la MX2000 CB-RE native.
Le routeur MX2008 prend en charge les RCB suivants :
REMX2008-X8-64G
REMX2008-X8-64G-LT
REMX2008-X8-128G
Fonction RCB
Le RCB exécute Junos OS. Les processus logiciels qui s’exécutent sur le RCB gèrent les tables de routage, gèrent les protocoles de routage utilisés sur le routeur, contrôlent les interfaces du routeur, contrôlent certains composants du châssis et fournissent l’interface pour la gestion du système et l’accès utilisateur au routeur.
Emplacements RCB
L’utilisateur peut installer un ou deux RCB dans le routeur. Chaque RCB est un moteur de routage et une carte de contrôle combinés dans une seule unité. Un port USB du RCB accepte un périphérique de stockage USB qui vous permet de charger Junos OS. Vous pouvez installer les RCB à l’avant du châssis dans des emplacements verticaux étiquetés 0 et 1. Si deux RCB sont installés, l’un fonctionne comme le principal et l’autre comme la sauvegarde. Si le RCB principal tombe en panne ou est supprimé et que la sauvegarde est configurée correctement, la sauvegarde prend le relais en tant que serveur principal. Si aucun RCB n’est installé dans un emplacement, installez un panneau vide dans l’emplacement.
Au moins un RCB doit être installé dans l’emplacement 0 ou l’emplacement 1 à tout moment.
Si l’un des RCB tombe en panne, ne retirez pas le RCB défaillant tant que vous n’avez pas installé un panneau de remplacement ou vierge.
Panneau avant RCB
Le tableau 1 décrit la Commission de routage et de contrôle (RCB).
|
Figure 1 : vue
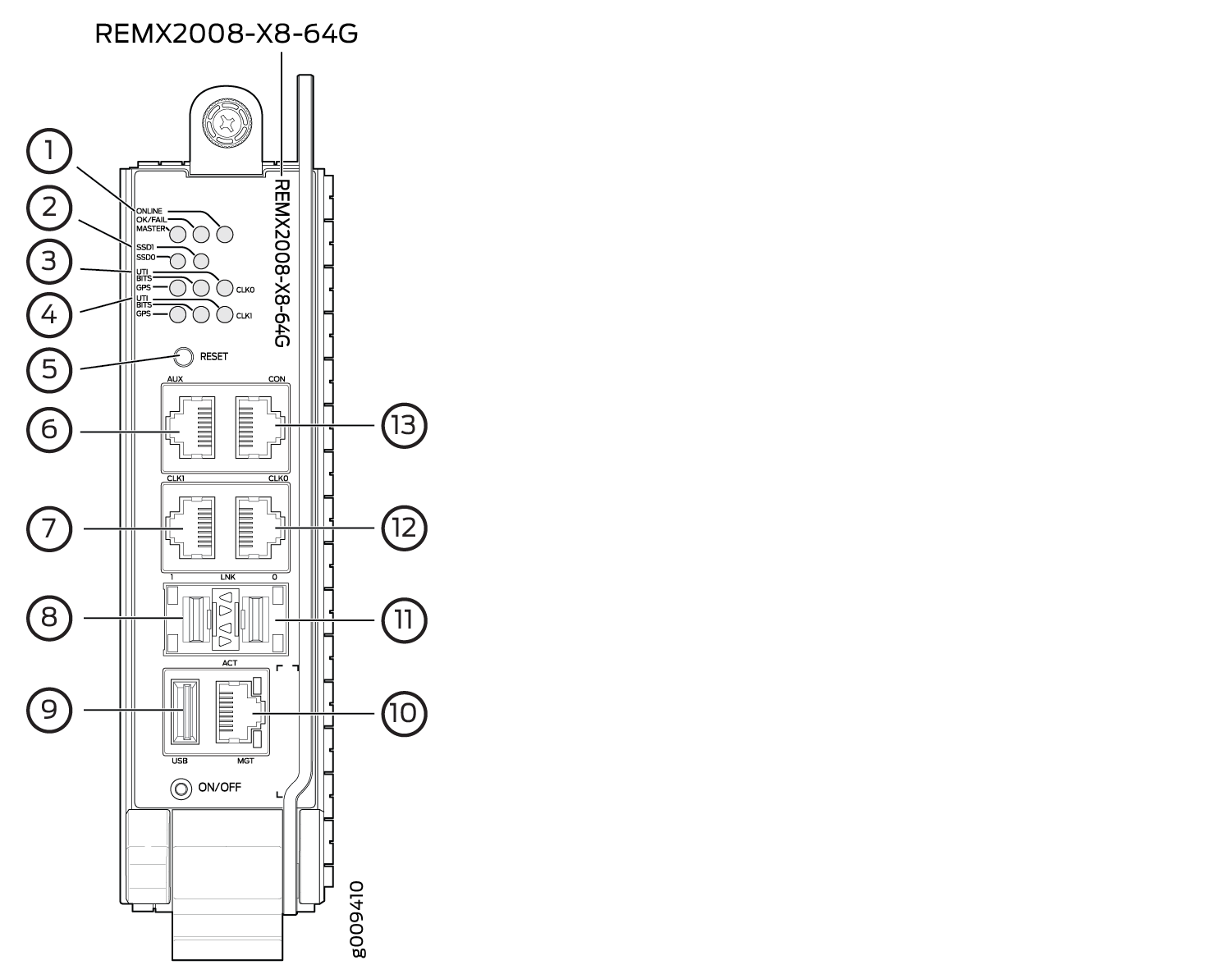 frontale du RCB frontale du RCB
|
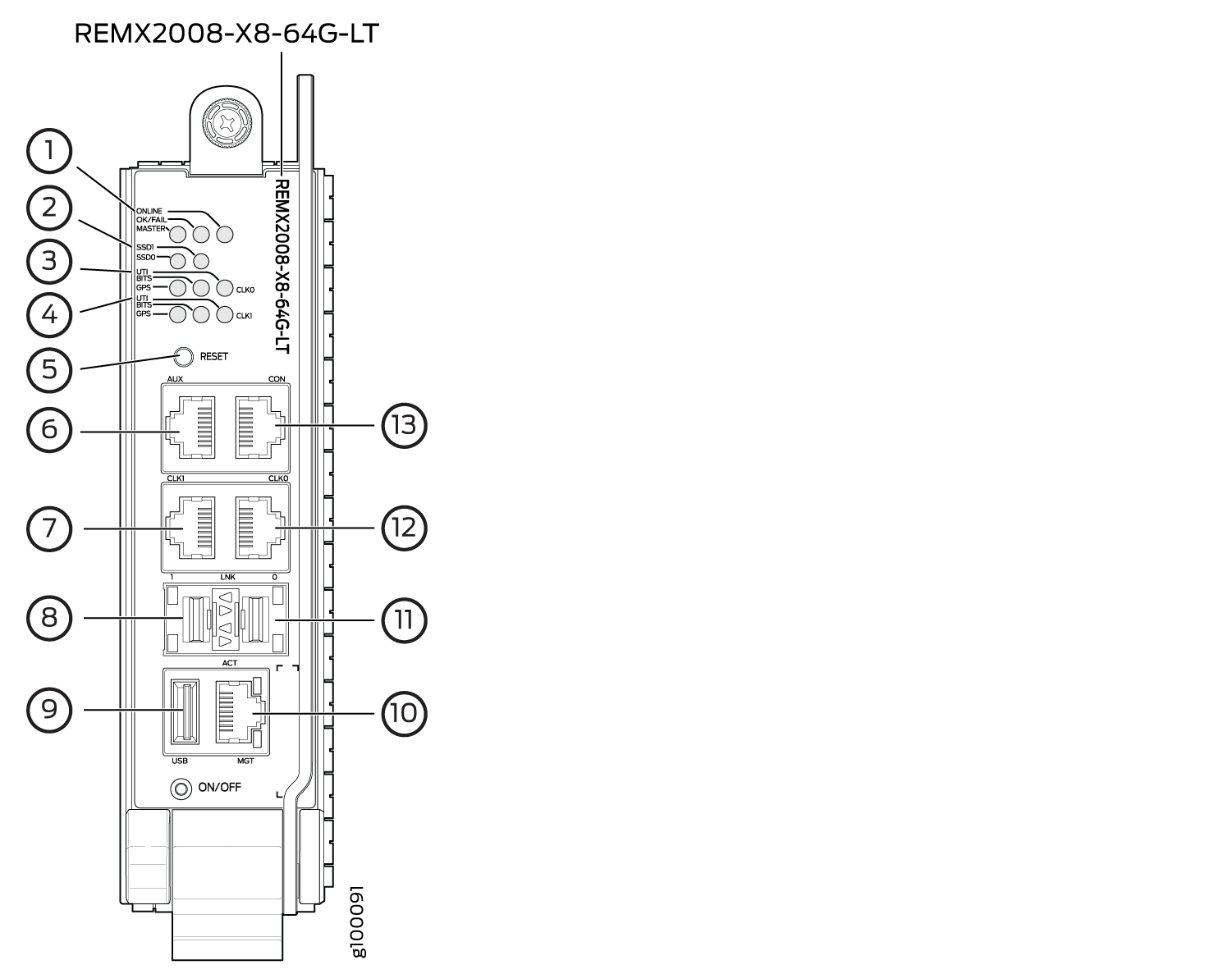
Figure 2 : vue frontale du RCB (REMX2008–X8-64G-LT)
|
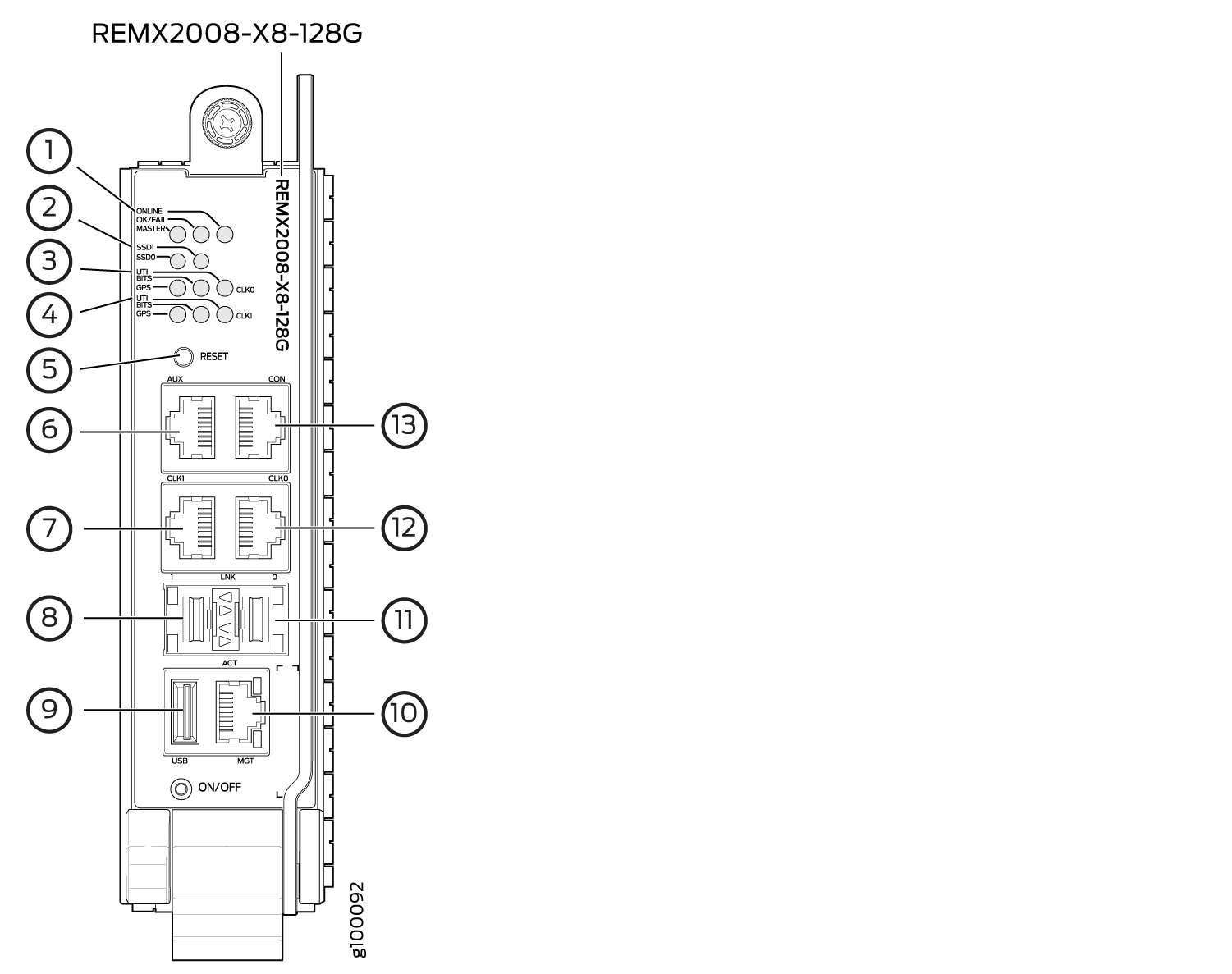
Figure 3 : vue frontale du RCB (REMX20008–X8-128G)
|
N° de fonction |
Étiquette |
Description |
|---|---|---|
1 |
EN LIGNE, MAÎTRE et OK/ÉCHEC |
Il y a une LED bicolore pour chaque commande RCB. Le voyant ONLINE indique que le RCB effectue une transition en ligne et fonctionne correctement. Le voyant MASTER indique que cette carte est un RCB principal et le voyant OK/FAIL indique que le RCB a échoué. |
2 |
SSD0 et SSD1 |
Les voyants indiquent l’état des deux disques SSD (Solid-State Drive) dans le RCB. |
3 4 |
GPS, UT1 et BITS |
Ces ports indiquent l’état de l’interface de pointage externe. Il y a une LED bicolore pour chaque interface d’horloge externe : GPS, UTI et BITS. |
5 |
RÉINITIALISER |
Ce bouton permettait de redémarrer le RCB. |
6 |
AUX AUX |
Ce port est utilisé pour connecter un ordinateur portable, un modem ou une autre unité auxiliaire. |
7 12 |
CLK0 et CLK1 |
Connecte le RCB à deux interfaces d’horloge externes pour la fonction BITS et GPS via un câble série avec un connecteur RJ-45. |
8 11 |
LNK-0 et LNK-1 |
Deux ports SFP+ connectent le RCB via une connexion Ethernet pour prendre en charge le diagnostic matériel et les tests de port JCS. Le port prend en charge deux connexions de 1 Gbit/s ou 10 Gbit/s. Le voyant de ces ports est associé à chacun des ports SFP+ (XGE-0 et XGE-1) et indique la connexion en cours d’utilisation. |
9 |
USB |
Ce port permet d’installer une clé USB contenant Junos OS. |
10 |
MGT |
Ce port est un canal de gestion dédié à la maintenance des équipements. Il permet également aux administrateurs système de surveiller et de gérer le routeur MX2008 à distance. |
13 |
CONSOLE |
Ce port est utilisé pour configurer le routeur MX2008. |
Ports d’interface RCB
Trois ports, situés sur le RCB, relient le RCB à un ou plusieurs périphériques externes sur lesquels les administrateurs système peuvent émettre des commandes CLI Junos OS pour gérer le routeur. En outre, quatre ports situés sur le RCB comprennent deux connecteurs d’interface SFP+ Ethernet 10 Gigabit prenant en charge le diagnostic matériel (test de port JCS) et deux interfaces d’horloge externes pour la fonction BITS et GPS.
Les ports d’interface RCB avec les étiquettes indiquées fonctionnent comme suit :
AUX : connecte le RCB à un ordinateur portable, un modem ou un autre équipement auxiliaire via un câble série muni d’un connecteur RJ-45.
CONSOLE : connecte le RCB à une console système via un câble série muni d’un connecteur RJ-45.
MGT : connecte le RCB via une connexion Ethernet à un réseau local de gestion (ou à tout autre périphérique se connectant à une connexion Ethernet) pour une gestion hors bande. Le port utilise un connecteur RJ-45 à détection automatique pour prendre en charge les connexions 10 Mbit/s, 100 Mbit/s ou 1000 Mbit/s. Deux petites LED en bas du port indiquent la connexion en cours d’utilisation : la LED clignote en jaune ou en vert pour une connexion de 10 Mbit/s, 100 Mbit/s ou 1000 Mbit/s, et la LED est allumée en vert lorsque le trafic passe par le port.
Les ports d’interface de la carte de contrôle fonctionnent comme suit :
USB : fournit une interface multimédia amovible qui vous permet d’installer Junos OS manuellement. Junos OS prend en charge USB version 1.0 et ultérieure.
LNK-0 et LNK-1 : deux ports SFP+ connectent le RCB via Ethernet pour prendre en charge deux connexions 1 Gbit/s ou 10 Gbit/s à tout boîtier de commande externe. Deux petites LED sur le côté de chaque port SFP+ indiquent la connexion en cours d’utilisation : la LED clignote en jaune lorsqu’il n’y a pas de liaison, clignote en vert lorsqu’il y a de l’activité ou s’allume en vert pour une connexion de 1 Gbit/s ou 10 Gbit/s.
CLK-0 et CLK-1 : connectez le RCB à une horloge externe via un câble série muni d’un connecteur RJ-45.
Voir aussi
Voyants RCB MX2008
La carte de routage et de contrôle (RCB) est une carte intégrée et une FRU unique qui fournit des fonctionnalités de moteur de routage et de carte de contrôle.
Chaque pièce du moteur de routage sur le RCB a trois voyants qui indiquent son état. Les LED, étiquetées ONLINE, MASTER, OK/FAIL, sont situées directement sur la façade du RCB. Le tableau 2 décrit les fonctions de l’interface du moteur de routage du RCB. Il y a trois LED sur l’interface craft pour chaque moteur de routage (RE0 et RE1). Ces voyants sont étiquetés MASTER, ONLINE, et OFFLINE.
Le voyant GPS s’allume lorsque le RCB est connecté à une interface de pointage externe.
La carte de contrôle, qui fait partie du sous-système hôte, dispose d’un ensemble de LED bicolores qui affichent son état. Les LED, étiquetées LINK, GPS et BITS, sont situées directement sur la plaque frontale du RCB. Le tableau 2 décrit les fonctions de l’interface de la carte de contrôle du RCB. Il y a deux LED sur l’interface du vaisseau pour chaque carte de contrôle : une étiquetée CB-RE0 (à l’extrême gauche) et une étiquetée CB-RE1 (à l’extrême droite). Pour plus d’informations sur les voyants RCB et Routing Engine sur l’interface Craft, voir MX2008 Component LEDs sur l’interface Craft.
RCB
N° de fonction |
Étiquette |
Couleur |
État |
Description |
|---|---|---|---|---|
1 |
ONLINE |
Vert |
Clignotement lent |
RCB démarre le BIOS. |
Clignotement rapide |
RCB démarre Linux. |
|||
En continu |
Junos OS et Linux sont chargés avec succès sur le RCB. |
|||
– |
Désactivé |
RCB est hors ligne. |
||
MAÎTRE |
Bleu |
En continu |
RCB est le principal. |
|
OK/ÉCHEC |
Jaune |
En continu |
RCB a échoué. |
|
Désactivé |
RCB fonctionne normalement. |
|||
2 |
SSD0 |
Vert |
Clignotant |
SSD0 est actif. |
SSD1 |
Vert |
Clignotant |
SSD1 est actif. |
|
3 |
UT1 |
Vert |
En continu |
L’interface d’horloge UTI (Universal Timing Interface) est active. |
Rouge |
En continu |
L’interface de synchronisation UTI a échoué. |
||
– |
Désactivé |
L’interface d’horloge UTI est hors ligne. |
||
BITS |
Vert |
En continu |
L’interface d’horloge externe d’alimentation de synchronisation intégrée au bâtiment (BITS) est active. |
|
Rouge |
En continu |
L’interface de pointage externe BITS a échoué. |
||
– |
Désactivé |
L’interface de pointage externe BITS est hors ligne. |
||
GPS |
Vert |
En continu |
L’interface d’horloge externe du système de positionnement global (GPS) est active. |
|
Rouge |
En continu |
L’interface d’horloge externe GPS a échoué. |
||
– |
Désactivé |
L’interface d’horloge externe GPS est hors ligne. |
Voir aussi
Spécifications du moteur de routage
Le tableau 3 répertorie les spécifications actuelles des moteurs de routage pris en charge sur les routeurs M Series, MX Series et T Series. Le tableau 4 répertorie les spécifications matérielles des moteurs de routage pris en charge par VMHost. Le tableau 5 répertorie les spécifications des moteurs de routage en fin de vie.
Pour obtenir la liste des moteurs de routage pris en charge par les routeurs M Series, MX Series, T Series et PTX, consultez Moteurs de routage pris en charge par routeur.
Moteur de routage |
Processeur |
Mémoire |
Connexion aux PFE |
Disque |
Médias |
Première prise en charge de Junos OS |
Carte de contrôle de commutation |
|---|---|---|---|---|---|---|---|
RE-400-768 |
Celeron 400 MHz |
768 Mo |
Fast Ethernet |
Disque dur de 40 Go |
Carte CompactFlash de 1 Go |
9.0 |
– |
| RE-A-1000-2048 |
Pentium 1,0 GHz |
2048 Mo |
Gigabit Ethernet |
Disque dur de 40 Go |
Carte CompactFlash de 1 Go |
8.1 |
– |
RE-A-2000-4096 |
Pentium 2,0 GHz |
4096 Mo |
Gigabit Ethernet |
Disque dur de 40 Go |
Carte CompactFlash de 1 Go |
8.1 |
– |
RE-S-1300-2048 |
Pentium 1,3 GHz |
2048 Mo |
Gigabit Ethernet |
Disque dur de 40 Go |
Carte CompactFlash de 1 Go |
8.2 |
SCB, SCBE |
RE-S-2000-4096 |
Pentium 2,0 GHz |
4096 Mo |
Gigabit Ethernet |
Disque dur de 40 Go |
Carte CompactFlash de 1 Go |
8.2 |
SCB, SCBE |
RE-C1800
|
1,8 GHz |
8 Go |
Gigabit Ethernet |
SSD |
Carte CompactFlash 4 Go |
Routeur T1600 dans une matrice de routage : 9.6R2 Routeur autonome T640 ou T1600 :11.2 |
CB-T pour un routeur autonome. CB-LCC pour un routeur dans une matrice de routage. |
1,8 GHz |
16 Go |
Gigabit Ethernet |
SSD |
Carte CompactFlash 4 Go |
Système d’exploitation Junos 32 bits sur un routeur T1600 autonome : 11.4R2 Système d’exploitation Junos 32 bits sur un routeur T1600 dans une matrice de routage : 11.4R2 Système d’exploitation Junos 64 bits sur un routeur T1600 autonome : 11.4R2 Système d’exploitation Junos 64 bits sur un routeur T1600 dans une matrice de routage : 11.4R2 |
CB-T pour un routeur autonome. CB-LCC pour un routeur dans une matrice de routage. |
|
RE-C2600 |
2,6 GHz |
16 Go |
Gigabit Ethernet |
SSD |
Carte CompactFlash 4 Go |
Routeur TX Matrix Plus : 9.6R2 |
– |
RE-A-1800x2 |
1800 MHz |
8 Go ou 16 Go |
Gigabit Ethernet |
32 Go SSD |
Carte CompactFlash 4 Go |
10.4 |
– |
RE-S-1800x2 |
1800 MHz |
8 Go ou 16 Go |
Gigabit Ethernet |
32 Go SSD |
Carte CompactFlash 4 Go |
10.4 |
SCB, SCBE, SCBE2, SCBE3 |
RE-S-1800x4 |
1800 MHz |
8 Go ou 16 Go |
Gigabit Ethernet |
32 Go SSD |
Carte CompactFlash 4 Go |
10.4 |
SCB, SCBE, SCBE2, SCBE3 |
RE-S-MX104 |
1,8 GHz |
4 Go |
Gigabit Ethernet |
– |
Flash NAND de 8 Go |
13.2 |
– |
RE-B-1800x1-4G |
1,73 GHz |
4 Go |
Gigabit Ethernet |
64 Go SSD |
Carte CompactFlash 4 Go |
12.1R2, 11.4R4 et 12.2R1 |
– |
RE-MX2000-1800x4 |
1,8 GHz |
16 Go |
Gigabit Ethernet |
32 Go SSD |
Carte CompactFlash interne fixe de 4 Go |
12.3R2 |
SFB |
RE-S-1800X4-32G-S |
1.8- Ghz |
32 Go |
Gigabit Ethernet |
32 Go SSD |
Carte CompactFlash interne fixe de 4 Go |
|
SCB, SCBE, SCBE2, SCBE3 |
REMX2K-1800-32G-S |
1.8- Ghz |
32 Go |
Gigabit Ethernet |
32 Go SSD |
Carte CompactFlash interne fixe de 4 Go |
|
– |
RE-S-X6-64G, RE-S-X6-64G-LT |
2 Ghz |
64 Go |
Gigabit Ethernet |
Deux SSD de 50 Go |
- |
|
SCBE2, SCBE3 |
REMX2K-X8-64G |
2,3 GHz |
64 Go |
Gigabit Ethernet |
Deux SSD de 100 Go |
- |
15.1F5-S1, 16.1R2 et 16.2R1 |
– |
REMX2K-X8-64G-LT |
2,3 GHz |
64 Go |
Gigabit Ethernet |
Deux SSD de 100 Go |
- |
17.2R1 |
– |
REMX2008-X8-64G |
2,3 GHz |
64 Go |
Gigabit Ethernet |
Deux SSD de 50 Go |
– |
15.1F7 |
– |
RE-S-1600x8 |
1,6 GHz |
64 Go |
Gigabit Ethernet |
Deux SSD de 50 Go |
– |
17.3R1 |
– |
REMX2008-X8-64G-LT |
2,1 GHz |
64 Go |
Gigabit Ethernet |
Deux SSD de 100 Go |
- |
17.2R1 |
- |
REMX2008-X8-128G |
2,3 GHz |
128 Go |
Gigabit Ethernet |
Deux SSD de 200 Go |
- |
18.2R1 |
- |
RE-S-X6-128G |
2,0 GHz |
128 Go |
Gigabit Ethernet |
Deux SSD de 200 Go |
- |
18.1R1 (SCBE2) 18.4R1 (SCBE3) |
SCBE2, SCBE3 |
| RE-S-X6-128G-K |
2,0 GHz |
128 Go |
Gigabit Ethernet |
Deux SSD de 200 Go |
- |
22.2R1S2 |
SCBE2, SCBE3 |
REMX2K-X8-128G |
2,1 GHz |
128 Go |
Gigabit Ethernet |
Deux SSD de 200 Go |
- |
18.1R1 |
- |
JNP10003-RE1 |
1,6 GHz |
64 Go |
Gigabit Ethernet |
Deux SSD de 100 Go |
- |
17.3R1 |
- |
JNP10003-RE1-LT |
1,6 GHz |
64 Go |
Gigabit Ethernet |
Deux SSD de 100 Go |
- |
18.1R1 |
- |
JNP10K-RE0 |
2,5 GhZ |
32 Go |
Gigabit Ethernet |
Deux SSD de 50 Go |
- |
17.2R1 |
- |
JNP10K-RE1 |
2,3 GhZ |
64 Go |
Gigabit Ethernet |
Deux SSD de 200 Go |
- |
18.2R1 |
- |
JNP10K-RE1-LT |
2,3 GhZ |
64 Go |
Gigabit Ethernet |
Deux SSD de 200 Go |
- |
18.3R1 |
- |
JNP10K-RE1-128 |
2,3 GhZ |
128 Go |
Gigabit Ethernet |
Deux SSD de 200 Go |
- |
18.3R1 |
- |
Utilisez un câble CAT5e blindé pour connecter les ports AUX, CONSOLE et MGMT dans les moteurs de routage RE-S-X6-64G, REMX2K-X8-64G et REMX2008-X8-64G.
Le tableau 4 répertorie les spécifications matérielles des moteurs de routage pris en charge par VMHost.
Numéro de modèle |
Pris en charge sur l’appareil |
Spécifications |
|---|---|---|
RE-S-X6-64G |
MX240, MX480 et MX960 |
|
RE-S-X6-128G |
MX240, MX480 et MX960 |
|
REMX2K-X8-64G |
MX2020 et MX2010 |
|
RE-PTX-X8-64G |
PTX5000 |
|
| RCB-PTX-X6-32G |
PTX3000 |
RCB combine les fonctionnalités d’un moteur de routage, d’une carte de contrôle et d’un générateur d’horloge centralisé (CCG) |
RE-S-1600x8 |
MX10003 |
|
RE-S-1600x8 |
MX204 |
|
RE-QFX10002-60C |
QFX10002-60C |
|
RE-PTX10002-60C |
PTX10002-60C |
|
RE-ACX-5448 |
ACX5448 |
|
RE-X10 |
MX10008 |
|
Moteur de routage |
Processeur |
Mémoire |
Connexion aux PFE |
Disque |
Médias |
Première prise en charge de Junos OS |
Détails de fin de vie |
|---|---|---|---|---|---|---|---|
RE-333-256 |
Pentium II 333 MHz |
256 Mo |
Fast Ethernet |
Disque dur de 6,4 Go |
Carte CompactFlash 80 Mo |
3.4 |
|
RE-333-768 |
Pentium II 333 MHz |
768 Mo |
Fast Ethernet |
Disque dur de 6,4 Go |
Carte CompactFlash 80 Mo |
3.4 |
|
RE-600-512 |
Pentium III 600 MHz |
512 Mo |
Fast Ethernet |
Disque dur de 30 Go |
Carte CompactFlash 256 Mo |
5.4 |
|
RE-600-2048 |
Pentium III 600 MHz |
2048 Mo |
Fast Ethernet |
Disque dur de 40 Go |
Carte CompactFlash de 1 Go |
5.3 |
|
RE-850-1536 |
Pentium III 850 MHz |
1536 Mo |
Fast Ethernet |
Disque dur de 40 Go |
Carte CompactFlash de 1 Go |
7.2 |
|
RE-M40 |
Pentium 200 MHz |
256 Mo |
Fast Ethernet |
Disque dur de 6,4 Go |
Carte CompactFlash 80 Mo |
3.2 |
|
RE-M40-333-768 |
Pentium II 333 MHz |
768 Mo |
Fast Ethernet |
Disque dur de 10 Go |
Carte CompactFlash 80 Mo |
4.2 |
|
RE-M40-600-2048 |
Pentium III 600 MHz |
2048 Mo |
Fast Ethernet |
Disque dur de 30 Go |
Carte CompactFlash 128 Mo |
5.4 |
|
RE-1600-2048 |
Pentium M 1,6 GHz |
2048 Mo |
Gigabit Ethernet |
Disque dur de 40 Go |
Carte CompactFlash de 1 Go |
6.2 |
La mémoire indiquée dans le tableau 3 indique la quantité de mémoire totale. Pour déterminer la quantité de mémoire disponible, exécutez la show chassis routing-engine commande CLI.
Sur les routeurs qui acceptent deux moteurs de routage, vous ne pouvez pas mélanger les types de moteurs de routage, sauf pendant une brève période (une minute environ) lors d’une mise à niveau ou d’une rétrogradation vers deux moteurs de routage du même type.
Voir aussi
Moteurs de routage pris en charge par routeur
Les tableaux suivants répertorient les moteurs de routage pris en charge par chaque routeur, la première version prise en charge du moteur de routage dans le routeur spécifié, l’interface Ethernet de gestion et les interfaces Ethernet internes pour chaque moteur de routage.
- Moteurs de routage M7i
- Moteurs de routage M10i
- Moteurs de routage M40e
- Moteurs de routage M120
- Moteurs de routage M320
- Moteur de routage MX5, MX10, MX40 et MX80
- Moteurs de routage MX104
- Moteur de routage MX204
- Moteurs de routage MX240
- Moteurs de routage MX480
- Moteurs de routage MX960
- Moteurs de routage MX2008
- Moteurs de routage MX2010
- Moteurs de routage pris en charge par MX2020
- Moteurs de routage MX10003
- Moteurs de routage MX10008
- Moteurs de routage PTX1000
- Moteurs de routage PTX3000
- Moteurs de routage PTX5000
- Moteurs de routage PTX10008 et PTX10016
- Moteur de routage PTX10001
- Moteur de routage PTX10002-60
- Moteurs de routage T320
- Moteurs de routage T640
- Moteurs de routage T1600
- Moteurs de routage T4000
- Moteurs de routage matriciels TX
- Moteurs de routage TX Matrix Plus
- Moteurs de routage TX Matrix Plus (avec SIB 3D)
Moteurs de routage M7i
Le Tableau 6 répertorie les moteurs de routage pris en charge par le routeur M7i. Le routeur M7i prend uniquement en charge le système d’exploitation Junos 32 bits.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| RE-400-768 (détails de fin de vie : TSB16445) |
|
9.0 |
fxp0 |
FXP1 |
| RE-850-1536 (détails de fin de vie : TSB15553) |
|
7.2 |
fxp0 |
FXP1 |
| RE-B-1800X1-4G |
|
11.4R4 12.1R2 |
fxp0 |
EM0 |
Moteurs de routage M10i
Le Tableau 7 répertorie les moteurs de routage pris en charge par le routeur M10i. Le routeur M10i prend uniquement en charge le système d’exploitation Junos 32 bits.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| RE-400-768 (détails de fin de vie : TSB16445) |
|
9.0 |
fxp0 |
FXP1 FXP2 |
| RE-850-1536 (détails de fin de vie : TSB15553) |
|
7.2 |
fxp0 |
FXP1 FXP2 |
| RE-B-1800X1-4G |
|
11.4R4 12.1R2 |
fxp0 |
EM0 |
Moteurs de routage M40e
Le Tableau 8 répertorie les moteurs de routage pris en charge par le routeur M40e.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version de Junos OS prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| RE-600-2048 (détails de fin de vie : TSB14373) |
|
5.3 |
fxp0 |
FXP1 FXP2 |
| RE-A-1000-2048 |
|
8.1 |
fxp0 |
FXP1 FXP2 |
Moteurs de routage M120
Le Tableau 9 répertorie les moteurs de routage pris en charge par le routeur M120.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| RE-A-1000-2048 |
|
8.0R2 |
– |
fxp0 |
FXP1 FXP2 |
| RE-A-2000-4096 |
|
8.0R2 |
– |
fxp0 |
EM0 BCM0 |
| RE-A-1800X2-8G |
|
|
10.4 |
fxp0 |
FXP1 FXP2 |
| RE-A-1800X2-16G |
|
|
10.4 |
fxp0 |
FXP1 FXP2 |
| RE-A-1800X4-16G |
|
|
10.4 |
fxp0 |
EM0 EM1 |
Moteurs de routage M320
Le tableau 10 répertorie les moteurs de routage pris en charge par le routeur M320.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| RE-1600-2048 (détails de fin de vie : TSB14374) |
|
6.2 |
– |
fxp0 |
FXP1 FXP2 |
| RE-A-2000-4096 |
|
8.1 |
– |
fxp0 |
EM0 BCM0 |
| RE-A-1800X2-8G |
|
|
10.4 |
fxp0 |
EM0 BCM0 |
| RE-A-1800X2-16G |
|
|
10.4 |
fxp0 |
EM0 BCM0 |
| RE-A-1800X4-8G |
|
|
10.4 |
fxp0 |
EM0 EM1 |
Moteur de routage MX5, MX10, MX40 et MX80
Le tableau 11 répertorie les moteurs de routage pris en charge par les routeurs MX5, MX10, MX40 et MX80.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| Moteur de routage intégré |
|
12.3 |
- |
fxp0 |
EM0 EM1
Note:
em1 est utilisé pour communiquer avec le MS-MIC lorsqu’il est inséré. |
Moteurs de routage MX104
Le Tableau 12 répertorie les moteurs de routage pris en charge par les routeurs MX104.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| RE-S-MX104 |
|
13.2 |
– |
fxp0 |
EM0 EM1 |
Moteur de routage MX204
Le Tableau 13 répertorie les moteurs de routage pris en charge par le routeur MX204.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| Moteur de routage intégré |
|
- |
17.4 |
fxp0 |
EM2 EM3 EM4 |
Moteurs de routage MX240
Le Tableau 14 répertorie les moteurs de routage pris en charge par les routeurs MX240.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| RE-S-1300-2048 (détails de fin de vie : TSB16556 |
|
9.0 |
– |
fxp0 |
FXP1 FXP2 |
| RE-S-2000-4096 (détails de fin de vie : TSB16735 |
|
9.0 |
– |
fxp0 |
FXP1 FXP2 |
| RE-S-1800X2-8G (détails de fin de vie : TSB16556 |
|
|
10.4
|
fxp0 |
EM0 EM1 |
| RE-S-1800x2-16G (détails de fin de vie : TSB16556 |
|
|
10.4 |
fxp0 |
EM0 EM1 |
| RE-S-1800X4-8G |
|
|
10.4 |
fxp0 |
EM0 EM1 |
| RE-S-1800X4-16G |
|
|
10.4 |
fxp0 |
EM0 EM1 |
| RE-S-1800X4-32G-S |
|
|
|
fxp0 |
em0, EM1 |
| RE-S-X6-64G |
|
– |
15.1F4 16.1R1 |
fxp0 |
ixlv0, igb0 |
| RE-S-X6-64G-LT |
|
– |
17.2R1 |
fxp0 |
ixlv0, igb0 EM0 |
| RE-S-X6-128G |
|
– |
18.1R1 |
fxp0 |
ixlv0, igb0 EM0 |
| RE-S-X6-128G-K | RE-S-X6-128G-K | - | 22.2R1S2 | fxp0 | ixlv0, igb0, em0 |
Moteurs de routage MX480
Le tableau 15 répertorie les moteurs de routage pris en charge par les routeurs MX480.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| RE-S-1300-2048 (détails de fin de vie : TSB16556 |
|
8.4 |
– |
fxp0 |
FXP1 FXP2 |
| RE-S-2000-4096 (détails de fin de vie : TSB16735 |
|
8.4 |
– |
fxp0 |
FXP1 FXP2 |
| RE-S-1800X2-8G (détails de fin de vie : TSB16556 |
|
|
10.4 |
fxp0 |
EM0 EM1 |
| RE-S-1800X2-16G (détails de fin de vie : TSB16556 |
|
|
10.4 |
fxp0 |
EM0 EM1 |
| RE-S-1800X4-8G |
|
|
10.4 |
fxp0 |
EM0 EM1 |
| RE-S-1800X4-16G |
|
|
10.4 |
fxp0 |
EM0 EM1 |
| RE-S-1800X4-32G-S |
|
|
|
fxp0 |
EM0 EM1 |
| RE-S-X6-64G |
|
–
|
15.1F4 16.1R1 |
fxp0
|
ixlv0, igb0
|
| RE-S-X6-64G-LT |
|
– |
17.2R1 |
fxp0 |
ixlv0, igb0 EM0 |
| RE-S-X6-128G |
|
– |
18.1R1 |
fxp0 |
ixlv0, igb0 EM0 |
| RE-S-X6-128G-K | RE-S-X6-128G-K | - | 22.2R1S2 | fxp0 | ixlv0, igb0, em0 |
Moteurs de routage MX960
Le tableau 16 répertorie les moteurs de routage pris en charge par les routeurs MX960.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| RE-S-1300-2048 (détails de fin de vie : TSB16556 |
|
8.2 |
– |
fxp0 |
FXP1 FXP2 |
| RE-S-2000-4096 (détails de fin de vie : TSB16735 |
|
8.2 |
– |
fxp0 |
FXP1 FXP2 |
| RE-S-1800X2-8G (détails de fin de vie : TSB16556 |
|
|
10.4 |
fxp0 |
EM0 EM1 |
| RE-S-1800X2-16G (détails de fin de vie : TSB16556 |
|
|
10.4 |
fxp0 |
EM0 EM1 |
| RE-S-1800X4-8G |
|
|
10.4 |
fxp0 |
EM0 EM1 |
| RE-S-1800X4-16G |
|
|
10.4 |
fxp0 |
EM0 EM1 |
| RE-S-1800X4-32G-S |
|
|
|
fxp0 |
EM0 EM1 |
| RE-S-X6-64G |
|
– |
15.1F4 16.1R1 |
fxp0 |
ixlv0, igb0 |
| RE-S-X6-64G (pour MX960-VC) |
|
– |
17.2R1 |
fxp0 |
ixlv0, igb0 |
| RE-S-X6-64G-LT |
|
– |
17.2R1 |
fxp0 |
ixlv0, igb0 EM0 |
| RE-S-X6-128G |
|
– |
18.1R1 |
fxp0 |
ixlv0, igb0 EM0 |
| RE-S-X6-128G-K | RE-S-X6-128G-K | - | 22.2R1S2 | fxp0 | ixlv0, igb0, em0 |
Moteurs de routage MX2008
Le Tableau 17 répertorie les moteurs de routage pris en charge par les routeurs MX2008.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| REMX2008-X8-64G |
|
15.1F7 |
fxp0 |
ixlv0 IXLv1 |
| REMX2008-X8-64G-LT |
|
17.2R1 |
fxp0 |
ixlv0 IXLv1 |
| REMX2008-X8-128G |
RE-MX2008-X8-128G |
18.2R1 |
fxp0 |
ixlv0 IXLv1 |
Moteurs de routage MX2010
Le tableau 18 répertorie les moteurs de routage pris en charge par les routeurs MX2010.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| RE-MX2000-1800X4 |
|
12.3R2 |
fxp0 |
EM0 EM1 |
| REMX2K-1800-32G-S |
|
|
fxp0 |
EM0 EM1 |
| REMX2K-X8-64G |
|
|
fxp0 |
ixlv0 IXLv1 EM0 |
| REMX2K-X8-64G-LT |
|
17.2R1 |
fxp0 |
ixlv0 IXLv1 EM0 |
| REMX2K-X8-128G
|
|
18.1R1 |
fxp0 |
ixlv0 IXLv1 |
Moteurs de routage pris en charge par MX2020
Le tableau 19 répertorie les moteurs de routage pris en charge par les routeurs MX2020.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| RE-MX2000-1800X4 |
|
12.3R2 |
fxp0 |
EM0 EM1 |
| REMX2K-1800-32G-S |
|
|
fxp0 |
EM0 EM1 |
| REMX2K-X8-64G |
|
|
fxp0 |
ixlv0 IXLv1 EM0 |
| REMX2K-X8-64G-LT |
|
17.2R1 |
fxp0 |
ixlv0 IXLv1 EM0 |
| REMX2K-X8-128G |
|
18.1R1 |
fxp0 |
ixlv0 IXLv1 EM0 |
Moteurs de routage MX10003
Le Tableau 20 répertorie les moteurs de routage pris en charge par MX10003 routeurs.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| JNP10003-RE1 |
|
17.3R1 |
fxp0 |
EM3 EM4 |
| JNP10003-RE1-LT |
|
18.1R1 |
fxp0 |
EM3 EM4 |
Moteurs de routage MX10008
Le Tableau 21 répertorie les moteurs de routage pris en charge sur le routeur MX10008.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version de Junos OS prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| JNP10K-RE1 |
|
18.2R1 |
EM0 |
BME0 BME1 |
Moteurs de routage PTX1000
Le tableau 22 répertorie le moteur de routage pris en charge sur le PTX1000.
Le PTX1000 prend uniquement en charge le système d’exploitation Junos 64 bits.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version de Junos OS prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| Moteur de routage intégré |
|
|
EM0 EM2 |
BME0 EM1 |
Moteurs de routage PTX3000
Le tableau 23 répertorie les moteurs de routage pris en charge sur le PTX3000.
Le PTX3000 prend uniquement en charge le système d’exploitation Junos 64 bits.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version de Junos OS prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| RE-DUO-C2600-16G |
|
13.2R2 |
EM0 |
ixgbe0 ixgbe1 |
| RCB-PTX-X6-32G |
|
16.1R4 17.1R1 Ce moteur de routage ne prend pas en charge Junos OS version 16.2. |
EM0 |
ixlv0 IXLv1 |
Moteurs de routage PTX5000
Le tableau 24 répertorie les moteurs de routage pris en charge sur le PTX5000.
-
PTX5000 prend uniquement en charge Junos OS 64 bits.
-
Le routeur PTX5000 prend en charge deux plans médians. Le fond de panier médian identifié comme
Midplane-8Sétant dans la sortie CLI est pris en charge dans les versions 12.1X48, 12.3 et 13.2 de Junos OS. Le fond de panier central amélioré, identifié comme étant pris en charge àMidplane-8SePpartir de Junos OS version 14.1.Le moteur de routage RE-DUO-2600 avec Junos OS 13.2 ou version antérieure n’est pas pris en charge sur le fond de panier central PTX5000BASE2.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version de Junos OS prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| RE-DUO-C2600-16G |
|
12,1X48 12.3 13.2
Note:
Le PTX5000 ne prend pas en charge Junos OS versions 12.1, 12.2 ou 13.1. |
EM0 |
ixgbe0 ixgbe1 |
| RE-PTX-X8-64G |
|
15.1F4 16.1R1 |
EM0 |
ixlv0 IXLv1 EM1 |
| RE-PTX-X8-128G |
|
18.1R1 |
EM0 |
ixlv0 IXLv1 EM1 |
Moteurs de routage PTX10008 et PTX10016
Le tableau 25 répertorie les moteurs de routage pris en charge sur les routeurs PTX10008 et PTX10016.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version de Junos OS prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| JNP10K-RE0 |
|
17.2R1 |
EM0, EM1 |
BME0 BME1 |
| JNP10K-RE1 (sur PTX10008) |
|
18.2R1 |
EM0 EM1 |
BME0 BME1 |
Moteur de routage PTX10001
Le tableau 26 répertorie le moteur de routage pris en charge sur le routeur PTX10001 (JNP10001-20C).
| Numéro de modèle |
Nom dans la sortie CLI |
Première version de Junos OS prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| Moteur de routage intégré |
|
18.4R1 |
EM0, EM2 |
EM1 BME0 |
Moteur de routage PTX10002-60
Le Tableau 27 répertorie le moteur de routage pris en charge sur le routeur PTX10002-60.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version de Junos OS prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| Moteur de routage intégré |
|
18.2R1 |
EM0, EM2 |
EM1 BME0 |
Moteurs de routage T320
Le Tableau 28 répertorie les moteurs de routage pris en charge par le routeur T320.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| RE-600-2048 (détails de fin de vie : TSB14373) |
|
5.3 |
fxp0 |
FXP1 FXP2 |
| RE-1600-2048 (détails de fin de vie : TSB14374 |
|
6.2 |
fxp0 |
FXP1 FXP2 |
| RE-A-2000-4096 |
|
8.1 |
fxp0 |
FXP1 FXP2 |
Le routeur T320 prend en charge la carte de contrôle CB-T.
Moteurs de routage T640
Le Tableau 29 répertorie les moteurs de routage pris en charge par le routeur T640.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| RE-600-2048 (détails de fin de vie : TSB14373) |
|
5.3 |
– |
fxp0 |
FXP1 FXP2 |
| RE-1600-2048 (détails de fin de vie : TSB14374 |
|
6.2 |
– |
fxp0 |
FXP1 FXP2 |
| RE-A-2000-4096 |
|
8.1 |
– |
fxp0 |
EM0 BCM0 |
| RE-DUO-C1800-8G |
|
Système d’exploitation Junos 32 bits sur un routeur T640 autonome : 11,2 Système d’exploitation Junos 32 bits sur un routeur T640 dans une matrice de routage : 11.4R9 |
Système d’exploitation Junos 64 bits sur un routeur T640 autonome : 11,3 Système d’exploitation Junos 64 bits sur un routeur T640 dans une matrice de routage : 11.4R9 |
EM0 |
BCM0 EM1 |
| RE-DUO-C1800-16G |
|
Système d’exploitation Junos 32 bits sur un routeur T640 autonome : 11.4R2 Système d’exploitation Junos 32 bits sur un routeur T640 dans une matrice de routage : 11.4R9 |
Système d’exploitation Junos 64 bits sur un routeur T640 autonome : 11.4R2 Système d’exploitation Junos 64 bits sur un routeur T640 dans une matrice de routage : 11.4R9 |
EM0 |
BCM0 EM1 |
Le routeur autonome T640 prend en charge la carte de contrôle CB-T et CB-LCC dans une matrice de routage T640.
Moteurs de routage T1600
Le Tableau 30 répertorie les moteurs de routage pris en charge par le routeur T1600.
(Deux RE-DUO-C1800-8G ou deux RE-DUO-C1800-16G sont nécessaires pour se connecter à une matrice de routage)
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| RE-600-2048 (détails de fin de vie : TSB14373) |
|
8.5 |
– |
fxp0 |
FXP1 FXP2 |
| RE-1600-2048 (détails de fin de vie : TSB14374 |
|
8.5 |
– |
fxp0 |
FXP1 FXP2 |
| RE-A-2000-4096 |
|
8.5 |
– |
fxp0 |
EM0 BCM0 |
| RE-DUO-C1800-8G |
|
Système d’exploitation Junos 32 bits sur un routeur T1600 dans une matrice de routage : 9,6
Note:
Les versions 9.6 à 10.4 de Junos OS prennent en charge RE-DUO-C1800-8G uniquement lors de la mise à niveau vers un châssis de carte ligne (LCC) dans une matrice de routage. Système d’exploitation Junos 32 bits sur un routeur T1600 autonome : 11,1 |
Junos OS 64 bits sur un routeur T1600 dans une matrice de routage : 9,6 Système d’exploitation Junos 64 bits sur un routeur T1600 autonome : 11,1 |
EM0 |
BCM0 EM1 |
| RE-DUO-C1800-16G |
|
Système d’exploitation Junos 32 bits sur un routeur T1600 autonome : 11.4R2 Junos OS 32 bits sur un routeur T1600 dans une matrice de routage : 11.4R2 |
Système d’exploitation Junos 64 bits sur un routeur T1600 autonome : 11.4R2 Système d’exploitation Junos 64 bits sur un routeur T1600 dans une matrice de routage : 11.4R2 |
EM0 |
BCM0 EM1 |
Moteurs de routage T4000
Le Tableau 31 répertorie les moteurs de routage pris en charge par le routeur T4000.
Le routeur T4000 prend uniquement en charge le système d’exploitation Junos 64 bits.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|
| RE-DUO-C1800-8G |
|
Routeur T4000 autonome : 12.1 Routeur T4000 dans une matrice de routage : 13,1 |
EM0 |
BCM0 EM1 |
| RE-DUO-C1800-16G |
|
Routeur T4000 autonome : 12.1R2 Routeur T4000 dans une matrice de routage : 13,1 |
EM0 |
BCM0 EM1 |
Le routeur T4000 prend en charge la carte de contrôle CB-LCC.
Moteurs de routage matriciels TX
Le Tableau 32 répertorie les moteurs de routage pris en charge par le routeur TX Matrix.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| RE-600-2048 (détails de fin de vie : TSB14373) |
|
7.0 |
– |
fxp0 |
FXP1 FXP2 |
| RE-1600-2048 (détails de fin de vie : TSB14374 |
|
7.0 |
– |
fxp0 |
FXP1 FXP2 |
| RE-A-2000-4096 |
|
8.5 |
– |
fxp0 |
EM0 BCM0 |
| RE-DUO-C1800-8G |
|
11.4R9 |
11.4R9 |
EM0 |
BCM0 EM1 |
| RE-DUO-C1800-16G |
|
11.4R9 |
11.4R9 |
EM0 |
BCM0 EM1 |
Le routeur TXP prend en charge deux cartes de contrôle, CB-TX et CB-LCC. Le CB-LCC est requis pour les moteurs de routage RE-DUO-C1800-8G et RE-DUO-C1800-16G.
Moteurs de routage TX Matrix Plus
Le Tableau 33 répertorie les moteurs de routage pris en charge par le routeur TX Matrix Plus.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| RE-DUO-C2600-16G |
|
Système d’exploitation Junos 32 bits : 9.6 |
Système d’exploitation Junos 64 bits : 11,4 |
EM0 |
ixgbe0 ixgbe1 |
Le routeur TX Matrix Plus prend en charge la carte de contrôle CB-TXP.
Moteurs de routage TX Matrix Plus (avec SIB 3D)
Le tableau 34 répertorie les moteurs de routage pris en charge par le routeur TX Matrix Plus avec des SIB 3D.
| Numéro de modèle |
Nom dans la sortie CLI |
Première version 32 bits de Junos OS prise en charge |
Première version 64 bits du système d’exploitation Junos prise en charge |
Interface Ethernet de gestion |
Interface Ethernet interne |
|---|---|---|---|---|---|
| RE-DUO-C2600-16G |
|
- |
Système d’exploitation Junos 64 bits : 11,4 |
EM0 |
ixgbe0 ixgbe1 |